驾驶辅助系统2.0
提醒 |
适用于配置驾驶辅助系统2.0的车型。 |
提醒 |
您车辆上的驾驶辅助系统的类型取决于您购买的实际车辆配置。 |
本车辆配置了丰富的驾驶辅助功能,能提供主动的驾驶辅助,功能包括:
自适应巡航控制(ACC)
前碰撞预警(FCW)
自动紧急制动(AEB)
集成式巡航辅助(ICA)
车道偏离预警(LDW)
限速标识识别(TSR)
盲区监测系统(BSD)
变道辅助系统(LCA)
后方横向交通预警(RCTA)
下车开门预警系统(DOW)
驾驶辅助系统摄像头及前毫米波雷达传感器用于实现以下功能:
自适应巡航控制(ACC)
前碰撞预警(FCW)
自动紧急制动(AEB)
集成式巡航辅助(ICA)
车道偏离预警(LDW)
限速标识识别(TSR)
摄像头及前毫米波雷达传感器受到某些限制,进而也限制了使用驾驶辅助的功能。
视野受限
警告
摄像头有类似于人眼的限制,即它在暴雨、暴雪、浓雾、严重沙尘暴或降雪天气等情况下“视力”变差。在这些状况下,依靠摄像头的各系统的功能可能大大降低,或者暂时解除。
当用于扫描车道以探测行人、骑车人和其它车辆时,强烈的迎面灯光、车道上的反光、道路表面的冰雪、肮脏或者不清晰的车道标志线等,都可能大大降低摄像头的功能。
不得在摄像头单元前方或周围的挡风玻璃内外放置、粘贴或安装任何物品,否则可能会干扰摄像头的相关功能。
若雷达传感器视野区域内不允许出现其他障碍物(比如牌照框),否则会影响雷达传感器的探测性能。
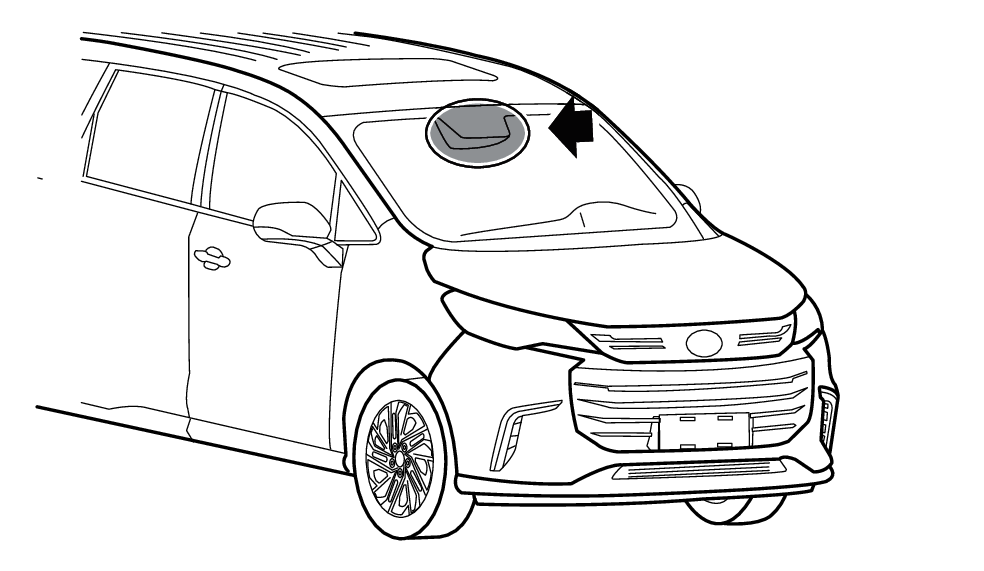
摄像头单元位于挡风玻璃上部,如果组合仪表信息中心显示“请清理前挡风玻璃”、“驾驶辅助摄像头故障”,则表示摄像头单元无法探测到本车前方的其它车辆。
前毫米波雷达传感器位于前保险杠下方。如果组合仪表信息中心显示“雷达系统故障”,则表示雷达传感器无法探测到本车前方的其他车辆。
下表所示为有关故障信息显示的可能原因示例,以及相应的处理措施:
原因 措施 摄像头单元前面的挡风玻璃表面太脏,或有结冰或积雪。
清洁摄像头单元前面的挡风玻璃表面上的尘土和冰雪。
浓雾和大雨或大雪阻挡了摄像头视野。
无处理方式。有时,摄像头单元在大雨与大雪中识别能力变差。
脏物可能出现在挡风玻璃内侧和摄像头单元之间。
建议您将车辆开到本公司授权服务商进行清洁单元盖罩内的挡风玻璃。
太阳直射和强烈的迎面灯光或者路面反光比较严重。
无处理方式。有时,摄像头在强直射光照下识别能力变差。
摄像头硬件损坏
建议您将车辆开到本公司授权服务商进行修理。
前毫米波雷达表面太脏,或有结冰或积雪。
清洁前毫米波雷达表面上的尘土和冰雪。
前毫米波雷达传感器硬件损坏
建议您将车辆开到本公司授权服务商进行修理。
挡风玻璃损坏
警告
如果在挡风玻璃上任一个摄像头单元“视窗”之前有裂缝、刮伤或碎石击伤,且其覆盖表面约0.5x3.0毫米或更大,则必须联系本公司授权服务商更换挡风玻璃进行检修。不采取措施可能会导致驾驶辅助系统性能降低。为避免使用摄像头及前毫米波雷达传感器的驾驶辅助系统出现操作失败、不充分或延缓,还应遵循以下建议:
建议您不要维修摄像头单元之前区域的裂缝、刮伤或碎石击伤,而是要更换整块挡风玻璃。
更换挡风玻璃前,请联系本公司授权服务商,以确保预定并安装了合适的挡风玻璃。
更换挡风玻璃雨刮时必须安装同类型或本公司核准的挡风玻璃雨刮。
挡风玻璃更换后,必须在本公司授权服务商重新校准摄像头,以确保所有基于摄像头的车辆系统功能正常。
视野受阻
摄像头及前毫米波雷达传感器的视野范围有限。在一些情况下,不能探测到另一部车辆,或与预期相比,探测会稍迟进行。
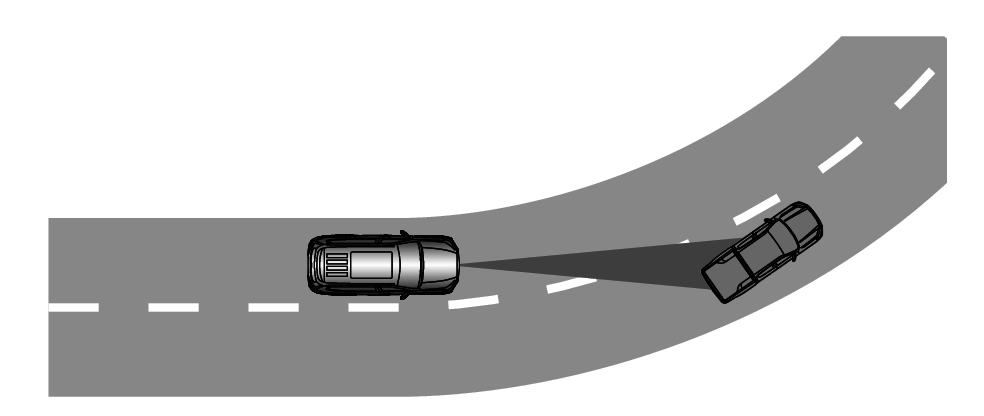
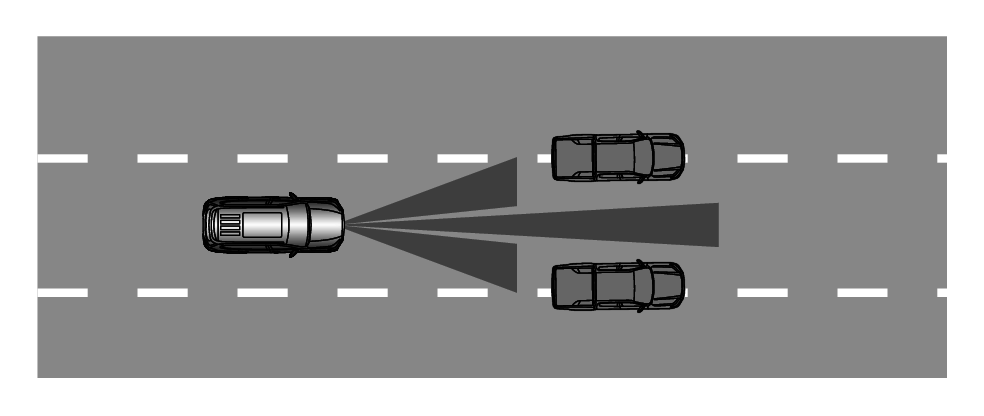
在弯道上,自适应巡航控制/集成式巡航辅助可能会对另一车道中的车辆做出反应,或可能没有时间对同一车道中的车辆做出反应。可能会与前方发生碰撞,或失去对车辆的控制。在弯道上要格外注意,并做好必要时施加制动的准备。在弯道上行车时,选择适当的速度。
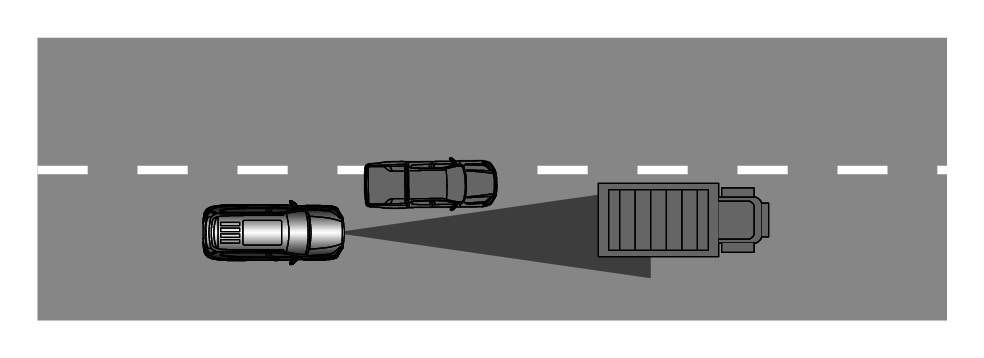
相邻车道的车辆驶入本车行驶方向前方时若未进入传感器监控区,传感器可能探测不到这些车辆,从而导致自适应巡航控制/集成式巡航辅助反应滞后。驾驶员需密切关注相邻车道的车辆动作,必要时应主动干预。
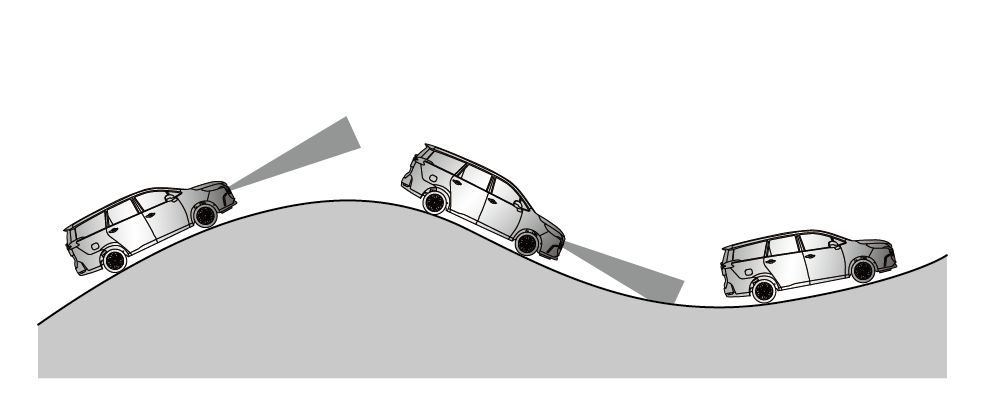
在陡峭的坡道上不要使用自适应巡航控制/集成式巡航辅助。在陡峭的坡道上,自适应巡航控制/集成式巡航辅助不能探测到同一车道上的车辆。在陡峭的坡道上,驾驶员通常需要自己控制车辆的加速和制动。如果施加了制动,则自适应巡航控制/集成式巡航辅助解除。另外,小于8%坡路上使用自适应巡航/集成式巡航可能出现速度控制不精准的情况,大于8%的坡道会存在溜坡风险,不允许使用自适应巡航控制/集成式巡航功能。
自适应巡航控制/集成式巡航辅助无法精确判断前方车道宽度,因此,当本车行驶方向前方车道过窄,驾驶员感觉无法正常通过时,要立即通过制动干预解除自适应巡航控制/集成式巡航辅助,并自行控制车辆。
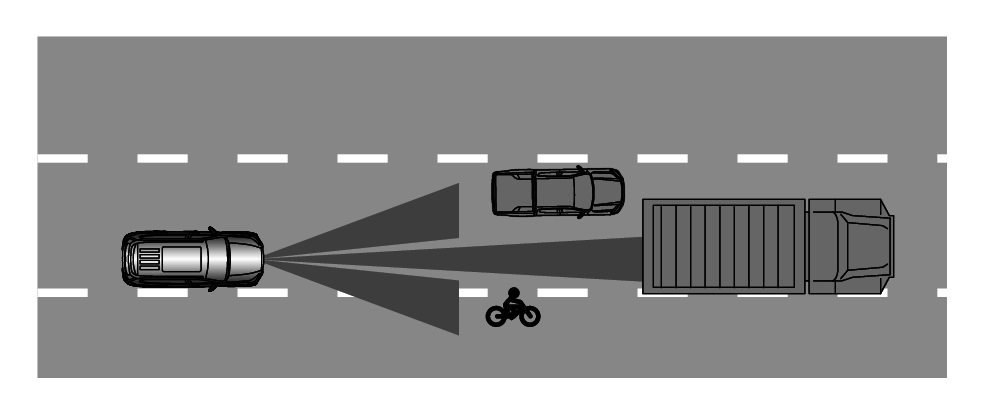
自适应巡航控制/集成式巡航辅助无法保证对行驶路径上所有类型车辆的探测,尤其不易识别自行车、摩托车等狭窄车辆。驾驶员需密切关注本车行驶方向前方的狭窄车辆。
使用频率: 76-77GHz。
峰值等效全向辐射功率限值: 55dBm(峰值e.i.r.p)。
杂散辐射等其他技术指标请参照信部无【2005】423号文件。
注意 |
不得擅自更改发射频率、加大发射功率(包括额外加装射频功率放大器),不得擅自外接天线或改用其它发射天线;使用时不得对各种合法的无线电通信业务产生有害干扰,一旦发现有干扰现象时,应立即停止使用,并采取措施消除干扰后方可继续使用;使用微功率无线电设备,必须忍受各种无线电业务的干扰或工业、科学及医疗应用设备的辐射干扰;不得在飞机和机场附近使用。 |
自适应巡航控制(ACC)
自适应巡航控制帮助驾驶员与前方的车辆保持相同的车速并保持预先选择的时间间隔。在畅通的高速公路和长直干道上的长途行驶中,自适应巡航控制系统能够为您带来更为轻松惬意的驾驶体验。驾驶员可设置所需的车速和与前车的时间间隔。当摄像头及前毫米波雷达传感器探测到前方车辆速度变慢时,本车的速度也将相应的自动减速。当前方道路再次畅通,车辆恢复至选择的车速。
警告 |
驾驶员必须总是随时关注当前交通情况,并在自适应巡航控制系统没有保持一个合适的车速或是正确的车距时进行干预。自适应巡航控制系统不可能处理所有交通、天气和道路状况。 请阅读本手册中有关自适应巡航控制系统的所有章节,了解该功能的限制,驾驶员在使用功能前应掌握这些限制。 驾驶员始终承担着保持正确车距和车速的最终责任,即使自适应巡航控制系统已启用。 |
前方车辆的距离由摄像头及前毫米波雷达传感器测量。自适应巡航控制功能是根据相对前车的速度及距离进行加速和减速控制。当自适应巡航控制系统使用制动器时,制动器发出低噪音是正常的。
自适应巡航控制目的在于以驾驶员设置的跟车时距,在同一条车道上跟随前方的车辆。如果摄像头及前毫米波雷达传感器无法看到前方的任何车辆,则将维持驾驶员设置的车速行驶。如果前方车辆的车速超过设定的车速,也会发生上述情况。
自适应巡航控制目的在于以平稳方式控制速度。在需要紧急制动的情况下,驾驶员必须自己制动。这牵涉到速度的大幅差异,或者如果前方车辆猛踩制动。由于摄像头及前毫米波雷达的限制,可能出现意外制动或完全不制动。
自适应巡航控制能够以从30公里/小时直至150公里/小时的车速跟随另一部车辆,在功能激活后可跟随前车减速至0公里/小时。
警告 |
自适应巡航控制系统不是一种防撞系统。如果系统未侦测到前方车辆则驾驶员必须介入。 对人或动物,以及小型车辆,例如自行车、摩托车、电动车,自适应巡航控制系统不会采取制动措施。还包括低架拖车以及接近的、缓慢移动或静止的车辆和物体。 在城市交通、交叉口、打滑表面、道路积水或烂泥较多、阴天、雨/雪天气、能见度较差、道路蜿蜒曲折或高速公路进出口等条件下,不得使用自适应巡航控制系统。 在太阳光从车辆的正面斜照到摄像头的场景,在进出隧道口的时候,在夜晚对面来车的远光灯正照射到摄像头的场景,都不适合使用本驾驶辅助系统。 |
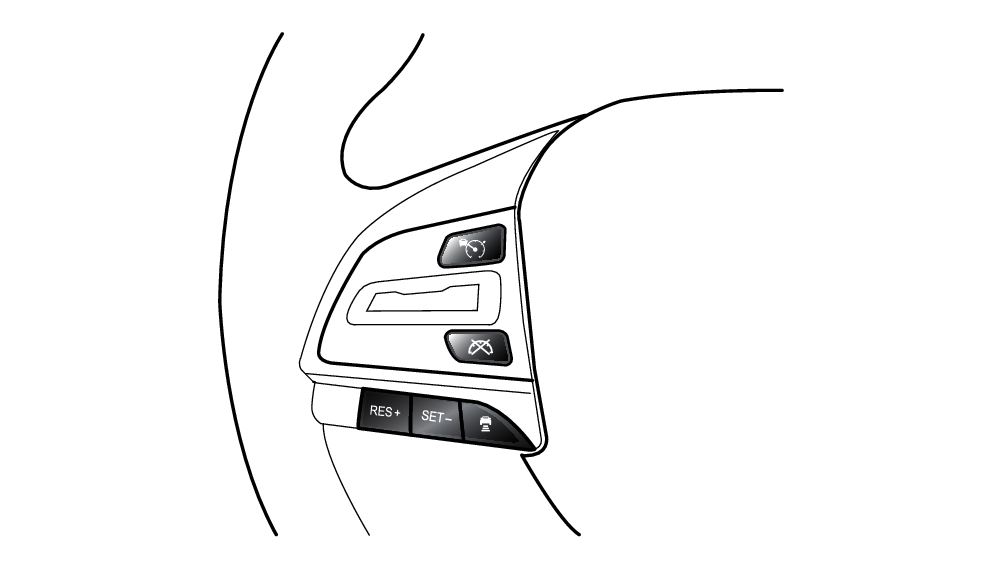
![]() :自适应巡航主开关,短按开启或关闭系统。
:自适应巡航主开关,短按开启或关闭系统。
当自适应巡航控制打开时:
![]() :自适应巡航退出开关,短按解除自适应巡航控制,而不清除设置的巡航车速。
:自适应巡航退出开关,短按解除自适应巡航控制,而不清除设置的巡航车速。
RES+:增加存储的车速或重新启用自适应巡航控制并恢复存储的车速。
SET-:减小存储的车速。
![]() :跟车间距设置,调整自适应巡航控制的跟车间距,每按一次在1~3级之间循环切换跟车间距。
:跟车间距设置,调整自适应巡航控制的跟车间距,每按一次在1~3级之间循环切换跟车间距。
![]() :自适应巡航(ACC)指示灯。当自适应巡航控制处于待机状态,灰色显示;当自适应巡航控制处于激活状态,蓝色显示。
:自适应巡航(ACC)指示灯。当自适应巡航控制处于待机状态,灰色显示;当自适应巡航控制处于激活状态,蓝色显示。
警告 |
自适应巡航控制仅警示其摄像头装置已检测到的车辆,因此可能不会发出警告,或者发出警告时会有一定延迟。需要制动时,不要等到警告发出再施加制动。 |
当车辆可能存在碰撞危险时,组合仪表信息中心会显示提示:

自适应巡航控制系统可利用脚制动器制动能力的约40%,如果在高速工况下前车紧急刹车,自适应巡航控制不足以将车辆减速至安全的车速范围,此时组合仪表会提示“请踩制动踏板”,驾驶员必须立即采取制动措施。
如果自适应巡航控制系统要控制速度,则其必须首先启用。
点火开关打到“ON(开启)”位置,若驾驶辅助系统检测除开启自适应巡航主开关
 外的其余条件满足,组合仪表上的“自适应巡航(ACC)指示灯(灰色)”
外的其余条件满足,组合仪表上的“自适应巡航(ACC)指示灯(灰色)” 点亮,表示自适应巡航控制系统置于待机模式。
点亮,表示自适应巡航控制系统置于待机模式。要启动自适应巡航控制,必须满足下列要求:
驾驶员座椅安全带必须系好,且所有车门和前舱盖必须关闭。
首次功能激活时车辆速度必须至少达到30公里/小时。
在自适应巡航控制系统待机模式正常的情况下,短按自适应巡航主开关
,自适应巡航控制系统启动,组合仪表上的“自适应巡航(ACC)指示灯(蓝色)”点亮,当前速度作为所需速度被存储在存储器中且在巡航图标中显示当前的巡航车速。
提醒 |
如果组合仪表信息中心显示“巡航不可用”,则表示摄像头及前毫米波雷达传感器系统自检自适应巡航系统条件不满足。 |
自适应巡航控制系统可以设置为不同的车速。自适应巡航功能开启后,可通过方向盘上的按键更改巡航车速。
通过短按或长按方向盘上的按键RES+或按键SET-更改存储的速度:
要以+/-5公里/小时的幅度进行更改,采用短按方式:每按一下更改+/-5公里/小时。
要以+/-1公里/小时的幅度更改,按住按键,当驾驶员显示屏中的指示器显示所需速度时再松开,最后一次按下的数值存储在记忆中。
如果驾驶员在按下方向盘上的按键![]() 之前踩下加速踏板增加车速,则按键
之前踩下加速踏板增加车速,则按键![]() 按下时存储的速度将成为车辆的速度,前提是在按下按键的瞬间驾驶员的脚位于加速踏板上。
按下时存储的速度将成为车辆的速度,前提是在按下按键的瞬间驾驶员的脚位于加速踏板上。
用加速踏板暂时增加车速,例如,在超车时,不会影响设置车速。当松开加速踏板后,车辆恢复至最后存储的车速。
注意 |
自适应巡航控制系统的最低可设置车速为30公里/小时,不能选择/存储低于30公里/小时的车速。 |
提醒 |
自适应巡航开启后,用加速踏板增加车速,在踩下加速踏板至释放踏板这段时间内巡航制动会失效,组合仪表信息中心显示“驾驶员主动提速”。 |
自适应巡航控制系统可以设置为不同的时间间隔。
对于前方车辆,有不同的时间间隔可以选择,在组合仪表信息中心显示为1~3条水平线:线条越多,其时间间隔将越长。1条线代表与前面车辆相距约1.5秒,3条线代表约2.5秒。同样的符号也在车距警示功能启用时显示。

提醒 |
当检测到前方有车辆时,自适应巡航以预先设定的跟车时距跟随前车。 |
自适应巡航控制激活后,可通过方向盘上的按键设置跟车间距,默认为3级。
按下方向盘上的跟车间距设置按键
 ,跟车间距将在1~3级之间循环切换。
,跟车间距将在1~3级之间循环切换。在某些情况下,自适应巡航控制可以允许时间间隔明显变化,以便本车辆可以平稳而舒适地跟随前面的车辆。距离短而低速时,自适应巡航控制稍微增加时间间隔。
注意 |
如果发生任何意外问题,短时间间隔只能向驾驶员提供短时间来做出反应并采取行动。 |
提醒 |
车速越高,在某一给定的时间间隔内按米计算的距离就越长。 |
自适应巡航控制功能可暂时停用,设置为待机模式并在稍后重启。
按下方向盘上的自适应巡航退出开关
 ,组合仪表上的“自适应巡航(ACC)指示灯”
从蓝色变为灰色,停用自适应巡航控制系统并将其置于待机模式。
,组合仪表上的“自适应巡航(ACC)指示灯”
从蓝色变为灰色,停用自适应巡航控制系统并将其置于待机模式。
以下情况下,自适应巡航控制功能暂时停用并设置为待机模式:
踩下脚制动器
驾驶员踩下制动踏板,自适应巡航功能会退出,进入待机模式。
若本次点火循环开启过自适应巡航/集成式巡航功能,组合仪表上有“自适应巡航(ACC)指示灯”![]() 灰色点亮时,按下方向盘按键RES+,此时自适应巡航功能激活并且车速设置为最近存储的车速。
灰色点亮时,按下方向盘按键RES+,此时自适应巡航功能激活并且车速设置为最近存储的车速。
注意 |
通过按下方向盘按键恢复速度后,可能出现显著的加速。 |
自适应巡航控制依赖于其他系统,例如电子稳定控制系统。如果任何系统的功能停止,则自适应巡航控制系统自动禁用。
在自动停用的情况下,会发出声音信号且驾驶员显示屏显示一条信息。驾驶员必须进行干预,匹配与前方车辆的速度和距离。
自动禁用的原因可能是:
驾驶员打开车门。
驾驶员解开安全带。
发动机转速过低/过高。
车轮失去抓地力。
制动温度太高。
使用驻车制动器。
ESP电子稳定系统功能激活。
ESP关闭时(即按下ESP OFF开关,组合仪表上的ESP OFF指示灯点亮,ESP系统关闭)。
摄像头被太阳直射或者迎面强光识别能力变差。
摄像头或前毫米波雷达传感器故障。
车速大于最大失效车速。
道路弯道半径小于250米。
自适应巡航控制系统在某些速度下具有变更目标的功能。
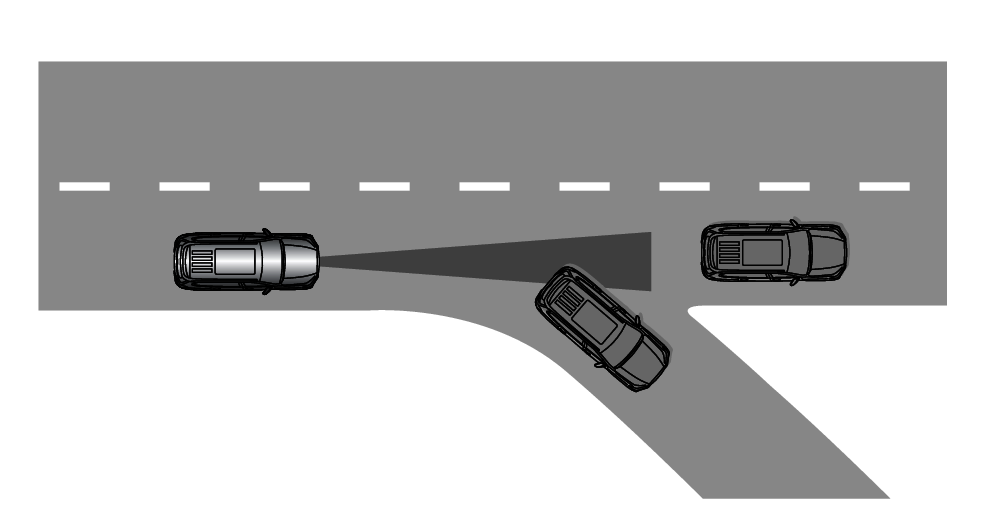
如果前方目标车辆突然转向,则前方的交通可能为静止。
警告 |
当自适应巡航控制系统以超过大约30公里/小时的车速跟随另一辆车,而目标车辆从移动状态变成静止状态时,自适应巡航控制将根据静止车辆进行制动。此时,驾驶员必须主动做出干预操作并且制动。 |
在某些情况下会受到限制。始终牢记,自适应巡航控制主要是在平坦路面上行驶时使用。当在陡峭的下坡道路上重载行驶时,此功能可能很难与前面的车辆保持正确的距离,在这些情况下,要特别小心,并随时准备制动。
巡航控制系统在坡道上的性能取决于车速、负载、以及坡道的坡度。爬陡坡时,可能需要踩住加速踏板以保持车速。下坡时,可能需要制动或降到低挡位以保持车速。
组合仪表信息中心会显示一些与自适应巡航控制系统相关的符号和消息。
| 符号 | 信息 | 含义 |

|
请轻踩油门或按RES+键 | 待机模式重新启动自适应巡航。 |
|
驾驶员主动提速 | 自适应巡航控制过程中驾驶员踩加速踏板加速,自适应巡航处于override超控状态。 |
|
|
请踩制动踏板 | 车辆需要驾驶员干预。 |

|
驾驶辅助摄像头故障 | 该系统工作不正常。请联系本公司授权服务商进行检修。 |

|
雷达系统故障 | 该系统工作不正常。请联系本公司授权服务商进行检修。 |

|
巡航不可用 | 系统暂时不可用。 |

|
巡航退出,请驾驶员接管 | 车辆需要驾驶员干预。 |

|
请释放EPB | 车辆需要驾驶员干预,释放EPB。 |
|
请释放刹车踏板 | 车辆需要驾驶员干预,释放刹车踏板。 |

|
请系好安全带 | 车辆需要驾驶员干预,系好安全带。 |

|
请挂入D挡 | 车辆需要驾驶员干预,挂入D挡。 |

|
请关闭车门 | 车辆需要驾驶员干预,关闭所有车门和前舱盖。 |
|
请清理前风挡玻璃 | 系统检测到摄像头视野区域有灰尘等,车辆需要驾驶员干预,清理前风挡玻璃。 |
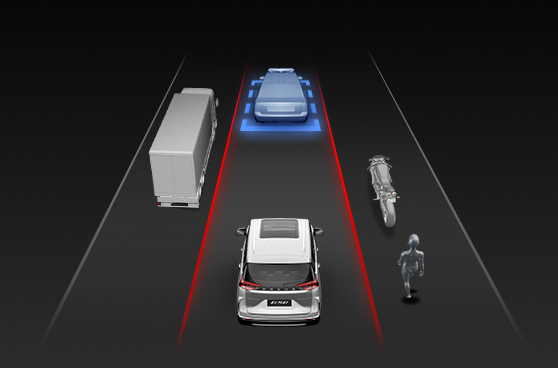
前碰撞预警(FCW)以及自动紧急制动(AEB)
前碰撞预警(FCW)功能用视觉和声音信号警告驾驶员车辆前方的行人、自行车或车辆。如果驾驶员未在一段合理的时间内采取行动,系统触发自动紧急制动(AEB)功能。
FCW在车辆出现与行人、骑车人或其它车辆发生碰撞的风险时,发出报警提示音及弹框,提醒用户采取制动措施。
AEB是一个辅助功能,系统在检测到即将发生碰撞时,会通过警示或采取制动操作来保护成员,避免因驾驶员反应不及时未能施加制动导致的碰撞风险。
AEB启用短促、急剧的制动并在车速小于等于40公里/小时时可刹停车辆,避免与前车碰撞。对于大多数驾驶员来说,这不属于正常驾驶风格,可能感觉到不适应。
AEB是在驾驶员应该提早开始制动情况下启动,因此也无法在所有情况下帮助驾驶员。
AEB之设计是要尽量晚启动,为了避免没有必要的介入。
驾驶员或乘客通常只有在车辆快要发生碰撞的情况下才会注意到AEB的功能。
AEB最多可降低40公里/小时的车速,从而避免与本车前方的车辆或自行车发生碰撞。
如果车速差大于40公里/小时,则AEB无法避免碰撞。在这种情况下要完全避免碰撞,驾驶员需要提前制动。
|
警告 |
AEB不可用作驾驶员随意改变驾驶风格的理由。如果驾驶员完全依赖AEB的功能来制动,迟早还是会发生碰撞事故。 |
在娱乐系统车辆状态中进行设置:车辆状态→车辆控制→辅助驾驶,可选择:关闭/报警/报警+自动制动。
前碰撞预警以及自动紧急制动系统按以下顺序执行三个步骤:
碰撞警告
首先警告驾驶员可能即将发生碰撞。FCW可探测驾驶员车辆前方的行人、骑车人或静止或同向行驶的车辆。存在与行人、骑车人或其它车辆发生碰撞的风险时,车辆将会通过闪烁的“FCW(前碰撞预警)/AEB(自动紧急制动)警告灯(黄色)”
 自动刹车警告灯(AEB).png) 、声音信号以及力度轻微的点刹形式的触觉警告向驾驶员发出警示。低速、紧急制动或加速时,将不发出触觉警告。
、声音信号以及力度轻微的点刹形式的触觉警告向驾驶员发出警示。低速、紧急制动或加速时,将不发出触觉警告。
制动支持
如果在发出碰撞警告后碰撞危险已经进一步增大,则辅助制动启用。如果系统认为该制动力不足以避免碰撞,可通过辅助制动加强驾驶员的制动力。
紧急制动
紧急制动功能最后启用。如果在此情况下,驾驶员仍然没有采取避让行动并且碰撞危险即将发生,则紧急制动功能就会被触发。无论驾驶员是否制动,紧急制动以最大制动力进行制动,以便减小碰撞速度,或以足以避免碰撞的有限制动力发生。当AEB成功避免了与静止物体发生碰撞后,车辆将保持静止,期待驾驶员采取主动行动。如果车辆是因前车车速较慢而制动,则车速就会降低至与前方车辆所保持的速度相同。驾驶员可通过踩下加速踏板随时中断制动干预。
注意
AEB制动时,制动灯亮起。
当AEB功能已启动并施加制动时,组合仪表上的“FCW(前碰撞预警)/AEB(自动紧急制动)警告灯(红色)”
将闪烁同时发出声音警告,指出该功能为启动状态或已经启动。
警告 |
AEB是一项辅助功能,无法在所有驾驶情况、交通、天气与路况下都起作用。仅当存在极易发生碰撞的风险时,才启动警告。驾驶员在使用AEB前,应参阅本章节查看需要了解的限制。 当车速超过80公里/小时时,对于行人及骑车人的警告和制动干预会关闭。AEB的自动制动功能可以防止碰撞或降低碰撞速度。为确保全力制动性能,驾驶员应始终踩住制动踏板,即使是当车辆自动制动时。 在剧烈加速的情况下,AEB不会启用自动制动功能。驾驶员应始终负责保持正确的距离与车速,切勿等到系统发出碰撞警告或AEB进行干预。 |
FCW启用后,可以设置该功能的灵敏度。
在娱乐系统车辆状态中进行设置:车辆状态→车辆控制→辅助驾驶,可选择:高/中/低。
灵敏度确定系统的警告距离,并调整视觉、声音和触觉警告触发的距离。如果觉得警告次数太多,或者干扰驾驶,就可以降低灵敏度。这将导致系统警告在较晚阶段出现,减少警告的总次数。
警告 |
如果出现碰撞危险,FCW会向驾驶员发出警告,但该功能不能缩短驾驶员的反应时间。要使AEB起作用,建议始终在灵敏度设置为高的情况下行驶。 即使灵敏度已经设置为高,在某些情况下,也可能很晚才能觉察出警告,例如,速度有较大的差异或前方车辆突然制动时。 任何自动系统都无法在所有条件下都能确保100%正常工作。因此,切勿在测试FCW/AEB时驶向人或车辆,这可能导致严重的损害和伤亡。 |
FCW/AEB能够探测到的障碍物有车辆、自行车和行人。
FCW/AEB可探测到大多数静止或与驾驶员车辆同向行驶的车辆。为使FCW/AEB能够在夜间探测到车辆,车辆的前后车灯必须工作并清晰点亮。
FCW/AEB将何种目标理解为骑车人的最佳示例如下:
清晰的身体轮廓和自行车轮廓。
发挥该系统的最佳作用要求探测骑车人的系统功能尽可能接收到关于人体和自行车轮廓的明确无误信息,这意味着可以与标准的人类运动方式相结合对自行车、头部、手臂、肩膀、大腿、上半身和下半身进行识别。
如果摄像头及前毫米波雷达不能捕捉到骑车人身体或自行车的较大部位,则系统就无法探测到骑车人。要使该功能探测到骑车人,他/她必须为成人且骑行“成人自行车”。
警告 |
FCW/AEB是一项辅助功能,该功能无法探测:所有情形下的所有自行车使用者,也不能“看到”部分身影模糊的自行车使用者,例如:衣服掩盖身体轮廓的骑车人,装载大型货物的自行车。 驾驶员始终对正当驾驶并以保持安全距离的相应车速行驶负责。 |
该系统探测身体外形清晰的行人的最佳示例如下:
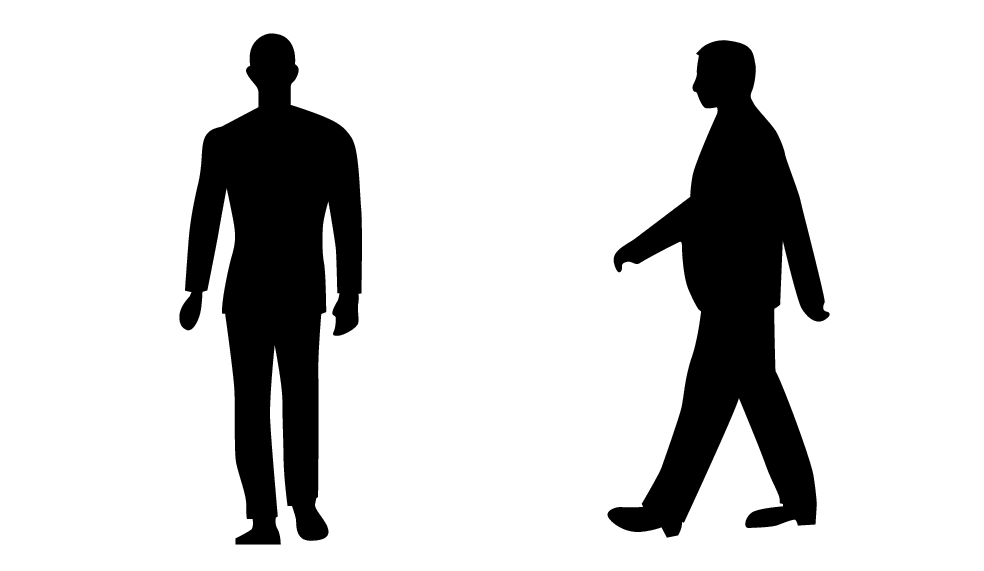
发挥该系统的最佳作用要求探测行人的系统功能尽可能接收到关于身体外形的明确无误的信息,这意味着可以与标准的人类运动方式相结合对头部、手臂、肩膀、大腿、上半身和下半身进行识别。
为使其能够探测到行人,行人必须与背景形成对比,这会受衣着、背景和天气的影响。如果对比度较低,则行人被探测到的时间会较迟或根本无法探测到,也即意味着警告和制动会滞后或无法实现。
利用汽车前大灯,FCW/AEB在夜间也可以探测到行人。
警告 |
FCW/AEB是一项辅助功能,无法在所有情况下探测到所有行人,例如以下情况无法看到行人:被部分遮挡、所穿衣物不易辨认身形或身高低于80厘米的行人;与背景的对比度差的行人,警告和制动干预可能会较晚发生或根本不会发生;携带较大物体的行人。 驾驶员始终对正当驾驶并以保持安全距离的相应车速行驶负责。 |
FCW/AEB功能可能在某些情况下具有限制。
较低物体
低垂的物体,例如标记装载物的旗帜/三角旗,或者像辅助灯和保险杠这样高于发动机盖的附件,都会限制这一功能。
滑移
在湿滑道路表面上,制动距离会延长,这可能导致AEB避免撞车的能力减低。在这些情况下,防抱死制动器和电子稳定性控制将施加最佳的制动力并保持稳定。
迎面灯光
在强烈日光、反光或佩戴太阳眼镜等情况下,或者驾驶员不向前直视时,都可能难以注意到仪表的视觉警告信号。
摄像头及前毫米波雷达传感器的视野
摄像头或前毫米波雷达传感器的视野受到限制,因此在某些情况下无法探测到行人、自行车和车辆,或探测结果迟于预期。在夜间光线较暗的情况下,摩托车探测到的时间可能会较迟或根本探测不到。
如果组合仪表上显示摄像头或前毫米波雷达故障,FCW/AEB可能无法探测到行人、自行车、车辆或本车前方的道路标线。这意味着FCW/AEB的功能性可能下降。
然而,并非在挡风玻璃传感器受阻的所有情况下均显示错误信息。因此驾驶员必须注意保持挡风玻璃以及摄像头及前毫米波雷达传感器的前方区域不受阻挡。
倒车
当您自己的车辆倒车时,FCW/AEB临时停用。
低速
FCW/AEB在极低车速(低于8公里/小时)时不启动,所以驾驶员以极低车速接近前方车辆的情况下该系统也不会介入,例如在驻车时。
驾驶员主动行为
驾驶员指令始终有优先权,因此FCW/AEB不会在驾驶员果断地转向和加速的情况下干预或延迟警告/干预,即使无法避免碰撞。主动而有意识的驾驶方式可延迟碰撞警告和干预时间,从而最大限度减少不必要的警告。驾驶员主动关闭ESP时(即按下ESP OFF开关,组合仪表上的ESP OFF指示灯点亮,ESP系统关闭),AEB将不会介入。
警告 |
如果交通状况或外部影响致使摄像头或前毫米波雷达传感器无法正确探测到行人、骑车人或车辆,则可能延迟或完全不实施警告和制动干预。 为了增加系统的可靠性,建议车辆在夜间开启前大灯和尾灯。 因黑暗或可见度较差,对静止或缓慢行驶车辆的警告会解除。 当车速超过60公里/小时,对行人及骑车人的制动干预会关闭;车速超过80公里/小时,对行人及骑车人的警告会关闭;车速超过80公里/小时,对车辆的制动干预会关闭。 |
警告 |
不得在摄像头或前毫米波雷达传感器前方或周围的挡风玻璃内外放置、粘贴或安装任何物品,否则可能会干扰摄像头及前毫米波雷达传感器的相关功能。 |
组合仪表信息中心会显示一些与前碰撞预警以及自动紧急制动系统相关的符号和消息。
| 符号 | 信息 | 含义 |

|
前碰撞预警系统已关闭 | FCW/AEB声音和灯光报警关闭。 |
 |
前碰撞预警已开启,紧急制动已关闭 | AEB自动紧急制动功能关闭。 |
 |
FCW报警 | FCW黄色闪烁 |

|
AEB报警 | AEB红色闪烁 |
集成式巡航辅助(ICA)
集成式巡航辅助用于在结构化道路上辅助驾驶员操纵车辆,减轻驾驶员因长途驾驶中的重复驾驶行为而带来的驾驶疲劳。此功能可根据车辆行驶方向的交通情况为驾驶员提供车辆的纵向和横向辅助控制,纵向控制可以实现定速巡航和跟车,横向控制是根据左右侧的车道线将车辆控制在本车道中心附近,为驾驶者提供一种更轻松的驾驶方式。
警告 |
驾驶员必须总是随时关注当前交通情况,并在集成式巡航辅助系统没有保持一个合适的车速、正确的车距或横向功能偏出本车道时进行干预。集成式巡航辅助不可能处理所有交通、天气和道路状况。 请阅读本手册中有关集成式巡航辅助的所有章节,了解该功能的限制,驾驶员在使用功能前应掌握这些限制。 驾驶员始终承担着保持正确车距和车速的最终责任,即使集成式巡航辅助已启用。 |
前方车辆的距离由摄像头及前毫米波雷达传感器测量。本车道的横向距离由摄像头测量。集成式巡航辅助是根据相对前车的速度及距离、相对本车道线的横向距离及横向加速度进行加速、减速和横向扭矩控制。当集成式巡航辅助使用制动器时,制动器发出低噪音是正常的。
集成式巡航辅助目的在于以驾驶员设置的跟车时距,系统跟随前方的车辆并将自车维持在本车道行驶。如果摄像头及前毫米波雷达传感器无法看到前方的任何车辆,则将维持驾驶员设置的车速行驶。如果前方车辆的车速超过设定的车速,也会发生上述情况。如果摄像头无法看到前方车道线,则集成式巡航功能会受限,功能会降级至自适应巡航。
集成式巡航辅助目的在于以平稳方式控制纵向速度和横向扭矩。在需要紧急制动或偏离本车道的情况下,驾驶员必须自己制动或操作方向盘。如果前方车辆猛踩制动,由于摄像头及前毫米波雷达的限制,可能出现意外制动或完全不制动。如果前方车道线由窄变宽或由宽变窄时,由于摄像头识别限制以及内部算法逻辑,可能会出现较大角度的修正方向盘。
集成式巡航辅助能够以从30公里/小时直至150公里/小时的车速跟随另一部车辆,在功能激活后可跟随前车减速至0公里/小时。
警告 |
集成式巡航辅助不是一种防撞系统。如果系统未侦测到前方车辆则驾驶员必须介入。 对于十字路口集成式巡航辅助可能出现修正方向盘的动作,要求驾驶员在路口手扶方向盘,随时准备接管车辆。 对人或动物,以及小型车辆,例如自行车、摩托车、电动车,集成式巡航辅助不会采取制动措施。还包括低架拖车以及接近的、缓慢移动或静止的车辆和物体。 在城市交通、交叉口、打滑表面、道路积水或烂泥较多、阴天、雨/雪天气、能见度较差、道路蜿蜒曲折或高速公路进出口等条件下,不得使用集成式巡航辅助。 在太阳光从车辆的正面斜照到摄像头的场景,在进出隧道口的时候,在夜晚对面来车的远光灯正照射到摄像头的场景,都不适合使用本驾驶辅助系统。 |
![]() :集成式巡航辅助主开关,长按开启或关闭系统。
:集成式巡航辅助主开关,长按开启或关闭系统。
当集成式巡航辅助打开时:
![]() :集成式巡航辅助退出开关,短按解除集成式巡航辅助,而不清除设置的巡航车速。
:集成式巡航辅助退出开关,短按解除集成式巡航辅助,而不清除设置的巡航车速。
RES+:增加存储的车速。
SET-:减小存储的车速。
![]() :跟车间距设置,调整集成式巡航辅助的跟车间距,每按一次在1~3级之间循环切换跟车间距。
:跟车间距设置,调整集成式巡航辅助的跟车间距,每按一次在1~3级之间循环切换跟车间距。
![]() :集成式巡航辅助(ICA)指示灯。当集成式巡航辅助处于待机状态,灰色显示;当集成式巡航辅助处于激活状态,蓝色显示。
:集成式巡航辅助(ICA)指示灯。当集成式巡航辅助处于待机状态,灰色显示;当集成式巡航辅助处于激活状态,蓝色显示。
警告 |
集成式巡航辅助仅警示其摄像头及前毫米波雷达传感器已检测到的车辆,因此可能不会发出警告,或者发出警告时会有一定延迟。需要制动时,不要等到警告发出再施加制动。 |
当车辆可能存在碰撞危险时,组合仪表信息中心会显示提示:
集成式巡航辅助可利用脚制动器制动能力的约40%,如果在高速工况下前车紧急刹车,集成式巡航辅助不足以将车辆减速至安全的车速范围,此时组合仪表会提示“请踩制动踏板”,驾驶员必须立即采取制动措施。
集成式巡航辅助可通过EPS转向机实现将车辆维持在本车道,若驾驶员长时间未手扶方向盘,集成式巡航辅助将提醒驾驶员手扶方向盘,此时组合仪表显示会提示“请轻转方向盘”。
如果集成式巡航辅助系统要控制速度和方向盘扭矩,则其必须首先启用。
点火开关打到“ON(开启)”位置,若驾驶辅助系统检测除开启集成式巡航辅助主开关
外的其余条件满足,组合仪表上的“集成式巡航辅助(ICA)指示灯(灰色)” 点亮,表示集成式巡航辅助系统置于待机模式。
点亮,表示集成式巡航辅助系统置于待机模式。要启动集成式巡航辅助,必须满足下列要求:
驾驶员座椅安全带必须系好,且所有车门和前舱盖必须关闭。
首次功能激活时车辆速度必须至少达到30公里/小时。
在集成式巡航辅助系统待机模式正常的情况下,长按集成式巡航辅助主开关
,集成式巡航辅助系统启动,组合仪表上的“集成式巡航辅助(ICA)指示灯(蓝色)”点亮,当前速度作为所需速度被存储在存储器中且在巡航图标中显示当前的巡航车速。
提醒 |
如果组合仪表信息中心显示“集成式巡航辅助巡航不可用”,则表示摄像头及前毫米波雷达传感器系统自检集成式巡航辅助系统条件不满足。 |
集成式巡航辅助系统可以设置为不同的车速。集成式巡航辅助功能开启后,可通过方向盘上的按键更改巡航车速。
通过短按或长按方向盘上的按键RES+或按键SET-更改存储的速度:
要以+/-5公里/小时的幅度进行更改,采用短按方式:每按一下更改+/-5公里/小时。
要以+/-1公里/小时的幅度更改,按住按键,当驾驶员显示屏中的指示器显示所需速度时再松开,最后一次按下的数值存储在记忆中。
如果驾驶员在按下方向盘上的按键
之前踩下加速踏板增加车速,则按键
按下时存储的速度将成为车辆的速度,前提是在按下按键的瞬间驾驶员的脚位于加速踏板上。
用加速踏板暂时增加车速,例如,在超车时,不会影响设置车速。当松开加速踏板后,车辆恢复至最后存储的车速。
注意 |
集成式巡航辅助系统的最低可设置车速为30公里/小时,不能选择/存储低于30公里/小时的车速。 |
提醒 |
集成式巡航辅助开启后,用加速踏板增加车速,在踩下加速踏板至释放踏板这段时间内巡航制动会失效,组合仪表信息中心显示“驾驶员主动提速”。 |
集成式巡航辅助系统可以设置为不同的时间间隔。
对于前方车辆,有不同的时间间隔可以选择,在组合仪表信息中心显示为1~3条水平线:线条越多,其时间间隔将越长。1条线代表与前面车辆相距约1.5秒,3条线代表约2.5秒。同样的符号也在车距警示功能启用时显示。
提醒 |
当检测到前方有车辆时,集成式巡航辅助以预先设定的跟车时距跟随前车。 |
集成式巡航辅助激活后,可通过方向盘上的按键设置跟车间距,默认为3级。
按下方向盘上的跟车间距设置按键
,跟车间距将在1~3级之间循环切换。在某些情况下,集成式巡航辅助可以允许时间间隔明显变化,以便本车辆可以平稳而舒适地跟随前面的车辆。距离短而低速时,集成式巡航辅助稍微增加时间间隔。
注意 |
如果发生任何意外问题,短时间间隔只能向驾驶员提供短时间来做出反应并采取行动。 |
提醒 |
车速越高,在某一给定的时间间隔内按米计算的距离就越长。 |
集成式巡航辅助功能可暂时停用,设置为待机模式并在稍后重启。
按下方向盘上的集成式巡航辅助退出开关
,组合仪表上的“集成式巡航辅助(ICA)指示灯”从蓝色变为灰色,停用集成式巡航辅助系统并将其置于待机模式。
以下情况下,集成式巡航辅助功能暂时停用并设置为待机模式:
踩下脚制动器
驾驶员踩下制动踏板,集成式巡航辅助功能会退出,进入待机模式。
施加方向盘一定的扭矩
驾驶员施加方向盘的扭矩超过设定的值时,集成式巡航辅助功能会降级至自适应巡航功能,集成式巡航辅助功能进入待机模式。
组合仪表上有“集成式巡航辅助(ICA)指示灯”![]() 灰色点亮时,长按方向盘上的按键
灰色点亮时,长按方向盘上的按键![]() ,此时集成式巡航辅助功能激活并且车速设置为最近存储的车速。
,此时集成式巡航辅助功能激活并且车速设置为最近存储的车速。
集成式巡航辅助依赖于其他系统,例如电子稳定控制系统。如果任何系统的功能停止,则集成式巡航辅助系统自动禁用。
在自动停用的情况下,会发出声音信号且驾驶员显示屏显示一条信息。驾驶员必须进行干预,匹配与前方车辆的速度和距离。
自动禁用的原因可能是:
驾驶员打开车门。
驾驶员解开安全带。
发动机转速过低/过高。
车轮失去抓地力。
制动温度太高。
使用驻车制动器。
ESP电子稳定系统功能激活。
ESP关闭时(即按下ESP OFF开关,组合仪表上的ESP OFF指示灯点亮,ESP系统关闭)。
摄像头被太阳直射或者迎面强光识别能力变差。
摄像头或前毫米波雷达传感器故障。
车速大于最大失效车速。
道路弯道半径小于250米。
驾驶员打开转向灯/双跳灯。
车道线质量不佳。
驾驶员施加的横向扭矩值超过限定值。
集成式巡航辅助系统在某些速度下具有变更目标的功能。
如果前方目标车辆突然转向,则前方的交通可能为静止。
警告 |
当集成式巡航辅助系统以超过大约30公里/小时的车速跟随另一辆车,而目标车辆从移动状态变成静止状态时,集成式巡航辅助将根据静止车辆进行制动。此时,驾驶员必须主动做出干预操作并且制动。 |
在某些情况下会受到限制。始终牢记,集成式巡航辅助主要是在平坦且车道线清晰路面行驶时使用。
当在陡峭的下坡道路上重载行驶时,此功能可能很难与前面的车辆保持正确的距离,在这些情况下,要特别小心,并随时准备制动。
当在急转弯道路上,例如蛇形道路上时,由于前毫米波雷达传感器及摄像头视野的限制,集成式巡航辅助功能无法探测到前车,可能导致集成式巡航辅助控制车辆加速,需驾驶员随时准备接管车辆。
如集成式巡航辅助车辆与相邻车道距离过小(或者是相邻车道上的车辆过于靠近集成式巡航辅助车辆)时,可能造成集成式巡航辅助对该车辆做出反应并制动,请驾驶员注意道路变化及时接管车辆。
集成式巡航辅助在坡道上的性能取决于车速、负载、坡道的坡度及坡道的车道线等。爬陡坡时,可能需要踩住加速踏板以保持车速。下坡时,可能需要制动或降到低挡位以保持车速。
组合仪表信息中心会显示一些与集成式巡航辅助系统相关的符号和消息。
| 符号 | 信息 | 含义 |
|
|
请轻踩油门或按RES+键 | 待机模式重新启动自适应巡航。 |
|
|
驾驶员主动提速 | 自适应巡航控制过程中驾驶员踩加速踏板加速,自适应巡航处于override超控状态。 |
|
|
请踩制动踏板 | 车辆需要驾驶员干预。 |
|
|
驾驶辅助摄像头故障 | 该系统工作不正常。请联系本公司授权服务商进行检修。 |
|
|
雷达系统故障 | 该系统工作不正常。请联系本公司授权服务商进行检修。 |

|
集成式巡航辅助不可用 | 系统暂时不可用。 |
 |
集成式巡航辅助退出,请驾驶员接管 | 车辆需要驾驶员干预。 |
|
|
请释放EPB | 车辆需要驾驶员干预,释放EPB。 |
|
|
请释放刹车踏板 | 车辆需要驾驶员干预,释放刹车踏板。 |
|
|
请系好安全带 | 车辆需要驾驶员干预,系好安全带。 |
|
|
请挂入D挡 | 车辆需要驾驶员干预,挂入D挡。 |
|
|
请关闭车门 | 车辆需要驾驶员干预,关闭所有车门和前舱盖。 |
|
|
请清理前风挡玻璃 | 系统检测到摄像头视野区域有灰尘等,车辆需要驾驶员干预,清理前风挡玻璃。 |

|
横向控制退出,请接管方向盘 | 横向条件不满足,集成式巡航辅助功能退出,需要驾驶员接管横向功能。 |

|
请轻转方向盘 | 集成式巡航辅助检测驾驶员脱手超过一定时间,需要驾驶员轻转方向盘。 |

|
请紧握方向盘 | 集成式巡航辅助已触发一级脱手报警后,驾驶员继续未手扶方向盘,需要驾驶员紧握方向盘。 |

|
请立即接管车辆 | 集成式巡航辅助已触发二级脱手报警后,驾驶员继续未手扶方向盘,需要驾驶员立即接管车辆。 |
 |
紧急辅助功能已启用,请注意周边环境 | 集成式巡航辅助已触发三级报警,驾驶员持续不接管车辆,系统触发本车道刹停功能。 |
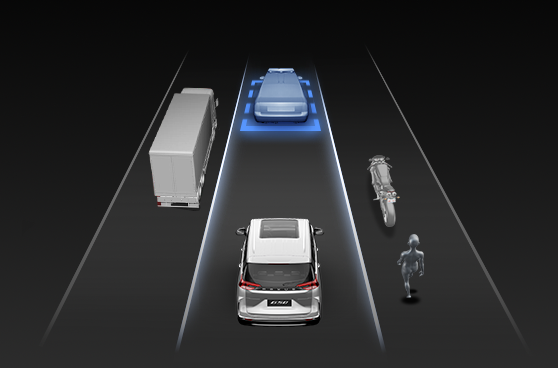
车道偏离预警(LDW)
车道偏离预警功能旨在帮助驾驶员在高速公路或类似主干道上在某些情形下有意外偏离车道的风险时,组合仪表通过声音和弹框提醒用户。
车道偏离预警(LDW):可通过声音及灯光信号警告驾驶员。当路边标线清晰可见时,车速介于60~150公里/小时,车道偏离预警功能(LDW)启用。
在狭窄道路上,该功能可能不可用,在这种情况下,其将进入待机模式。当道路足够宽时,该功能将再次可用。
车道偏离预警(LDW)界面:
如果车辆即将越过车道线,将通过声音和灯光信号警告驾驶员。
警告 |
车道偏离预警系统仅仅是报警提醒类功能功能,无法在所有驾驶情况或交通、天气与路况下都有作用。驾驶员应始终对确保车辆安全驾驶承担最终责任,并遵守适用的法律和道路交通规则。 |
系统打开,组合仪表信息中心显示界面如下:
组合仪表信息中心显示界面上的本车道的左右侧车道线未显示红色时,表示车道偏离预警功能未触发。
组合仪表中心显示界面上的本车道的左右侧车道线显示红色,表示车道偏离预警功能已经触发。
车速高于60公里/小时,并且系统检测到左侧或右侧车道线,此时在未打开转向灯的情况下,车辆偏离原车道线,偏向的那侧车道线颜色变红,并伴随着蜂鸣器报警。
车道偏离预警启用后,可以设置该功能的灵敏度。
在娱乐系统车辆状态中进行设置:车辆状态→车辆控制→辅助驾驶,可选择:高/中/低。
灵敏度确定系统的警告距离,并调整视觉、声音和触觉警告触发的距离。如果觉得警告次数太多,或者干扰驾驶,就可以降低灵敏度。这将导致系统警告在较晚阶段出现,减少警告的总次数。
限速标识识别(TSR)
限速标识识别功能(TSR)可帮助驾驶员在车辆路过时观察速度标志。

限速标识识别功能可根据标志和情形用不同方式记录并显示限速标识。
当TSR探测到带有强制限速的限速标识时,组合仪表上就会将该标志作为符号显示![]() ,如果检测到当前车辆的速度大于该限速标志的速度,该限速标识会闪烁,并伴有声音报警,显示和闪烁时长为3秒。
,如果检测到当前车辆的速度大于该限速标志的速度,该限速标识会闪烁,并伴有声音报警,显示和闪烁时长为3秒。
在娱乐系统车辆状态中进行设置:车辆状态→车辆控制→辅助驾驶,可选择:开启/关闭限速标识识别功能。
限速标识识别功能可能在某些情况下具有限制。可降低TSR功能的事例:
褪色的标志。
位于弯道上的标志。
旋转或损坏的标志。
高于路面的标志。
被完全/部分挡住或放置不当的标志。
被冰霜、雪和/或灰尘完全或部分遮盖的标志。
部分LED限速标志牌。
盲区监测系统(BSD)
警告 |
盲区监测系统并不是始终可靠的,它是对安全驾驶方式以及利用车外后视镜的补充,而非其替代功能。 |
盲区监测系统警示灯位于左右两侧的外后视镜上。

监测区域:
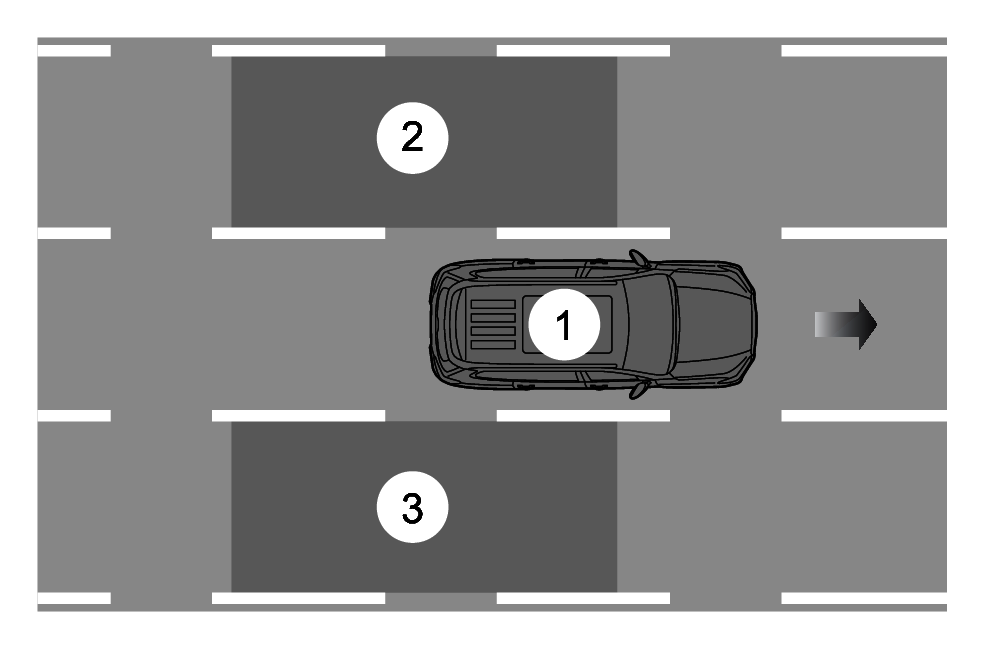
主车
左相邻区域
右相邻区域
预警告模式:
当左右相邻区域②和③存在目标车辆时,系统给予主车提示,对应侧的警告灯常亮。
当左右相邻区域②和③有目标车辆以较快速度超越主车时,系统给予主车提示,对应侧的警告灯常亮。
紧急警告模式:
当左右相邻区域②和③存在目标车辆时,同时主车有变道意图时(打开侧转向灯),系统给予主车预警,对应侧的警告灯闪烁。
提醒 |
只有车速大于20公里/小时且小于120公里/小时时,盲区监测功能才会被启用。 |
变道辅助系统(LCA)
变道辅助系统警示灯位于左右两侧的外后视镜上。
当目标车辆进入监测区域①,则对应侧的变道辅助系统警示灯常亮。
此时如果打开对应侧的转向灯,则变道辅助系统警示灯由常亮变为闪烁。
区域①监测范围为视觉盲点至车后4~7米,宽度为3米的左右两侧区域。
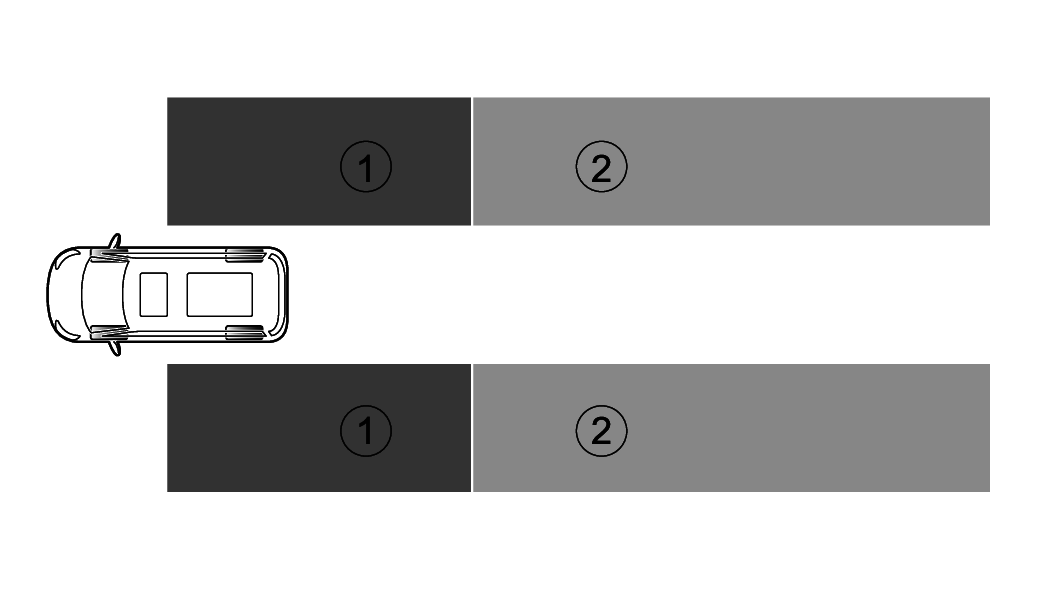
当目标车辆进入监测区域②,且快速接近本车,变换车道将会有撞车危险,则对应侧的变道辅助系统警示灯常亮。
此时如果打开对应侧的转向灯,则变道辅助系统警示灯由常亮变为闪烁。
区域②监测范围从车后45米,宽度为3米的左右两侧区域。
提醒 |
只有车速大于20公里/小时,盲点监测、变道辅助功能才会开启。 |
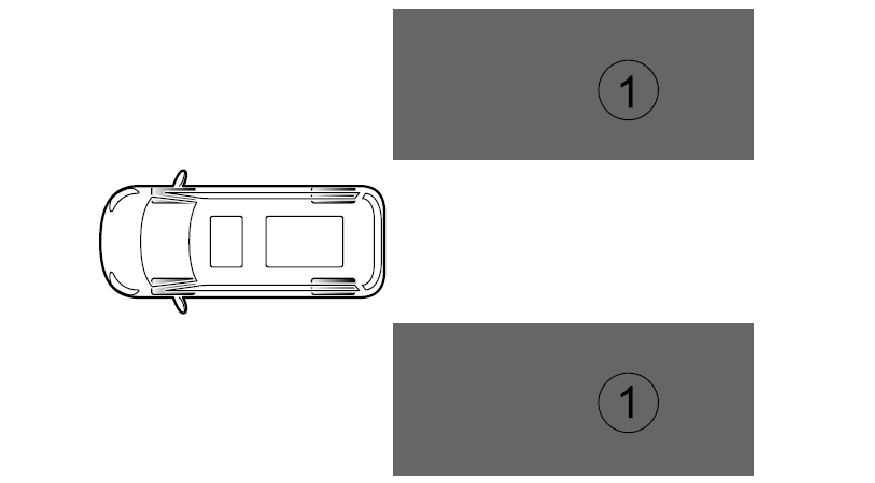
后方横向交通预警(RCTA)
变道辅助系统警示灯位于左右两侧的外后视镜上。
车辆倒车出库时,目标车辆进入监测区域(两侧各20米左右),有碰撞危险,则对应侧的变道辅助系统警示灯闪烁。
-1.png)
-2.png)
-3.png)
提醒 |
目标车辆车速10公里/小时~30公里/小时之间,本车车速小于10公里/小时,该功能才能启用。 |
下车开门预警系统(DOW)
警告 |
开门预警仅作为辅助安全系统,感知距离与实际距离可能不同。不能仅依靠开门预警系统识别车辆周边风险,请仔细查看车辆周围环境。 |
下车开门预警系统警示灯位于左右两侧的外后视镜上。下车开门预警系统(DOW)可以通过娱乐系统上的触摸开关控制开启和关闭。
当车辆靠边停车时,车辆侧后方雷达实时对相邻两侧监测区域内的动目标进行探测,当感知到后侧方动目标跟本车开门有碰撞风险时,下车开门预警系统(DOW)启动提醒机制,提醒驾驶员存在开门碰撞的风险。本功能旨在提升停车开门时客户的安全性。
1.png)
提醒 |
只有当车辆处于非R挡且车速低于5公里/小时时,下车开门预警功能才会被启用。 |
提醒 |
本车辆静止或车速低于3公里/小时时,该功能才能激活;目标车辆速度大于10公里/小时,才能出发报警。 |
预警告模式:
当动目标进入监测区域①,且系统判断开车门存在危险时,对应侧的下车开门预警系统警示灯常亮。
紧急警告模式:
在进入预警告模式的情况下,系统检测到同侧有车门打开,则对应侧的下车开门预警系统警示灯闪烁,仪表弹框提示的同时蜂鸣器报警。
提醒 |
本系统只提供本车旁边有限区域的监控,对于本车正后方来车或紧贴本车的动目标不能提供足够的报警。 |