泊车辅助系统
|
提醒 |
您车辆上的泊车辅助系统的类型取决于您购买的实际车辆配置。 |
摄像头为泊车辅助系统提供视觉辅助,具体请参阅驾驶辅助系统中的 摄像头 。超声波雷达为泊车辅助系统提供目标探测,具体请参阅驾驶辅助系统中的 雷达 。
倒车雷达传感器
|
警告 |
泊车辅助系统并不是始终可靠的,它仅仅起向导的作用!倒车雷达传感器可能探测不到某些类型的障碍物,例如:铁丝网或绳索类细小物体、靠近地面的小物体、锥状物体、某些表面不反射的物体。 雷达传感器上应当没有污垢、冰和雪。如果雷达传感器的表面有沉积物,会妨碍它的正常工作。所以在清洗车辆时,应避免用高压水枪近距离直接喷射雷达传感器。 |
位于后保险杠中的雷达传感器扫描车辆后部区域,判断是否有障碍物。如探测到障碍物,传感器就会计算它至车辆后部的距离,并以报警声响信号向驾驶员传送这一信息。非常重要的是,该系统仅仅是一个泊车辅助系统,不能把它作为观察和个人判断的替代物。
选择倒挡R后,泊车辅助系统会发出一声0.5秒提示音,提示系统自动开始工作。当选择其它挡位时,泊车辅助系统停止工作。
|
提醒 |
如果选择倒挡R后,系统发出3秒提示音,表示该系统发生了故障,应尽快联系本公司授权服务商检修。 |
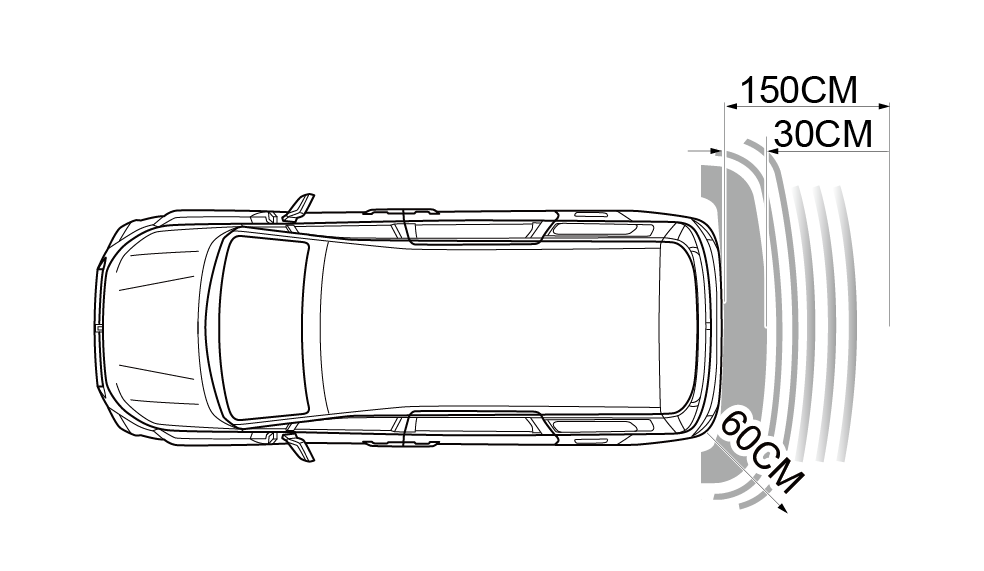
当车辆后部中间两个雷达距离障碍物约150厘米时,或两侧雷达距离障碍物约60厘米时,泊车辅助系统开始发出警报声,距离障碍物越近,警报声越急促。
当车辆距离障碍物距离小于30厘米时,泊车辅助系统将发出长鸣。此时如果继续倒车则障碍物将不能被有效识别。
前、后雷达传感器
|
警告 |
泊车辅助系统并不是始终可靠的,它仅仅起向导的作用!雷达传感器可能探测不到某些类型的障碍物,例如:铁丝网或绳索类细小物体、靠近地面的小物体、锥状物体、某些表面不反射的物体。 雷达传感器上应当没有污垢、冰和雪。如果雷达传感器的表面有沉积物,会妨碍它的正常工作。所以在清洗车辆时,应避免用高压水枪近距离直接喷射雷达传感器。 |
位于前保险杠中的雷达传感器扫描车辆前部区域,位于后保险杠中的雷达传感器扫描车辆后部区域,判断是否有障碍物。如探测到障碍物,传感器就会计算它至车辆的距离,并以报警声响信号向驾驶员传送这一信息。非常重要的是,该系统仅仅是一个泊车辅助系统,不能把它作为观察和个人判断的替代物。
选择倒挡R后,泊车辅助系统会发出一声0.5秒提示音,提示系统自动开始工作。退出倒挡R,后雷达泊车辅助系统停止工作。
选择倒挡R或前进挡D时,车速从0公里/小时升高至15公里/小时之间,前雷达泊车辅助系统工作;车速从15公里/小时降低至12公里/小时之间,前雷达泊车辅助系统待机;车速降低至12公里/小时及以下时,前雷达泊车辅助系统工作。
|
提醒 |
如果选择倒挡R或前进挡后,系统发出长音鸣叫,表示该系统发生了故障,应尽快联系本公司授权服务商检修。 |
按下中控屏上的前雷达按键开启前雷达泊车辅助系统。
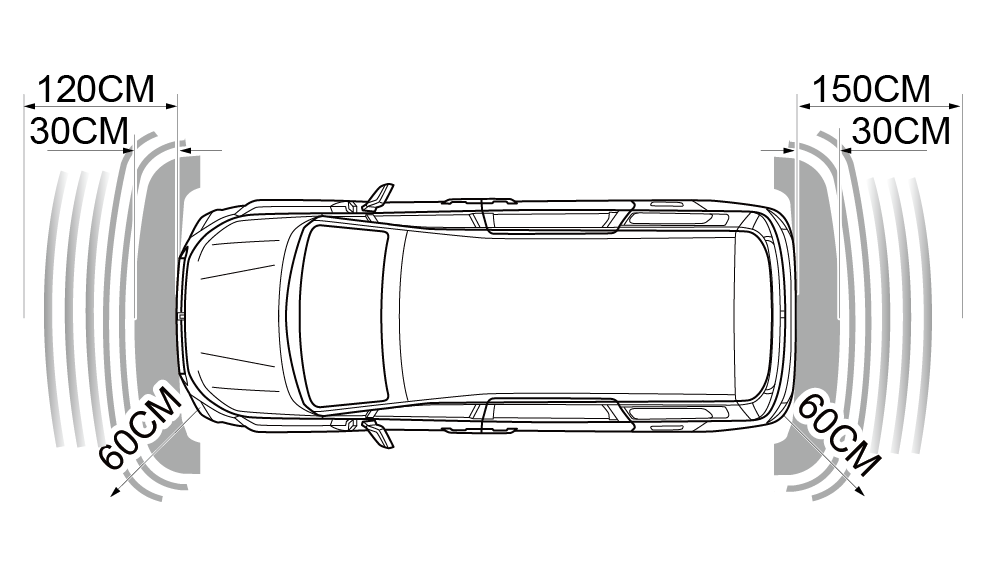
当车辆后部中间两个雷达距离障碍物约150厘米时,或两侧雷达距离障碍物约60厘米时,泊车辅助系统开始发出警报声,距离障碍物越近,警报声越急促。
当车辆前部两侧雷达距离障碍物约60厘米时,泊车辅助系统开始发出警报声,距离障碍物越近,警报声越急促。
|
提醒 |
对于配置自动泊车辅助系统的车辆,当车辆前部中间两个雷达距离障碍物约120厘米时,泊车辅助系统就开始发出警报声。 |
当车辆距离障碍物距离小于30厘米时,泊车辅助系统将发出长鸣。此时如果继续倒车则障碍物将不能被有效识别。
|
提醒 |
当车辆距离障碍物距离大于30厘米时,前雷达在前进挡D状态下具有3秒静音策略,如果经过了3秒,障碍物距离没有任何变化,则警报声将会停止,如果障碍物距离又发生了改变,则系统恢复发出警报声。 |
倒车影像
|
警告 |
倒车影像泊车辅助系统并不是始终可靠的,它仅仅起向导的作用!摄像头视野范围是有限的,探测不到视野范围以外的障碍物。 |
倒车影像泊车辅助系统的工作状态:
当选择倒挡R后,中控屏画面切换到倒车影像的工作状态,显示屏显示车辆后方的景物图像,以供驾驶员倒车时参考。
当选择其它挡位时,倒车影像泊车辅助系统停止工作,显示屏恢复倒车前的状态。

|
提醒 |
在车辆进入倒车状态时,摄像头输出静态倒车轨迹,静态倒车轨迹是以地平面为参照物,并显示在中控屏上,采用红、黄、绿三种颜色分段标识。 |
540环视系统
|
警告 |
540环视系统并不是始终可靠的。它仅仅起辅助的作用!由于摄像头视野范围限制,探测不到盲区及视野范围外障碍物,即使系统运行时,也请仔细查看车辆周围环境。 |
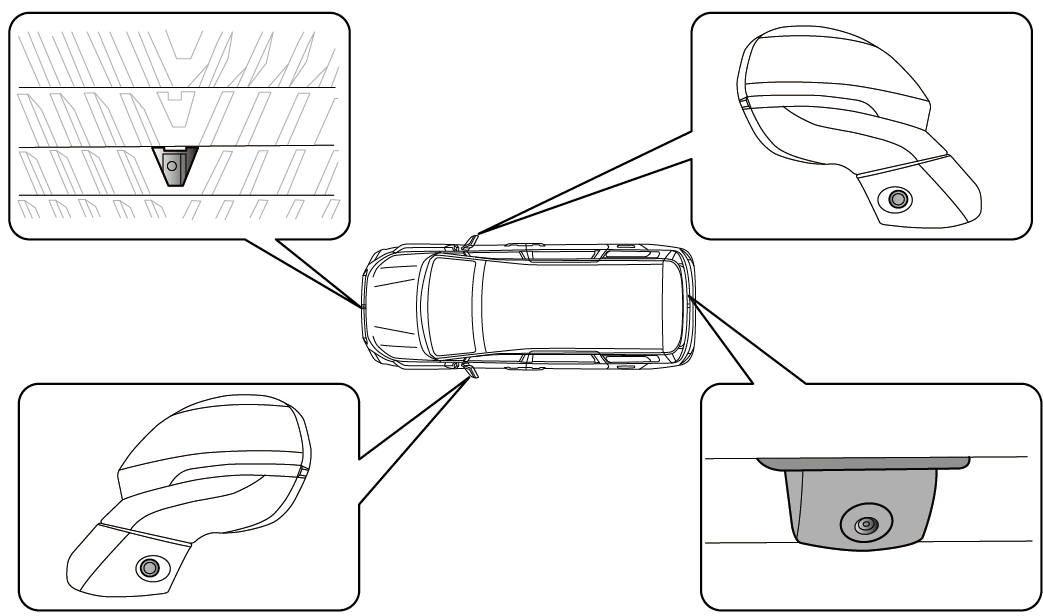
540环视系统包含四个摄像头及一个控制器,摄像头分别位于车辆的前、后、左、右四个方位。
540环视系统提供了多种辅助功能,主要包括:
-
2D图像
-
3D视角
-
车底视角
|
提醒 |
您车辆上540环视系统的类型取决于您购买的实际车辆配置。 |
-
选择倒挡R后触发环视系统。
-
车辆车速<15公里/小时时,通过中控屏主界面上的“360”图标唤醒全景系统。
功能开启后,可以在操作区进行2D/3D及前/后/左/右视角切换。
-
在全景界面下点击屏幕左上角“╳”进行关闭。
-
车辆车速≥30公里/小时时系统自动退出。
在全景界面下点击屏幕上的“设置”,用户可以选择开启/关闭“转向触发全景”,“前向轨迹线”“宽视角”等子功能。
车底视角功能可以提供车底的视野情况,比如观察井盖、马路牙及轮胎是否回正等情况。
在全景界面下点击屏幕上的“车底视角”进入车底视角界面,默认是前视角。
-
点击“2D图像”或“3D视角”切换出车底视角。
-
点击屏幕左上角“╳”关闭。
-
车辆车速≥30公里/小时时系统自动退出。
APA(自动泊车辅助)
本系统为融合式泊车系统,可以在多种场景下帮助您完成泊车动作。
|
警告 |
本系统是一种泊车辅助系统,并不具备完全的自动驾驶能力,为此,驾驶员必须保持对车辆和环境观察、判断的专注力,必要时随时接管车辆。 |
-
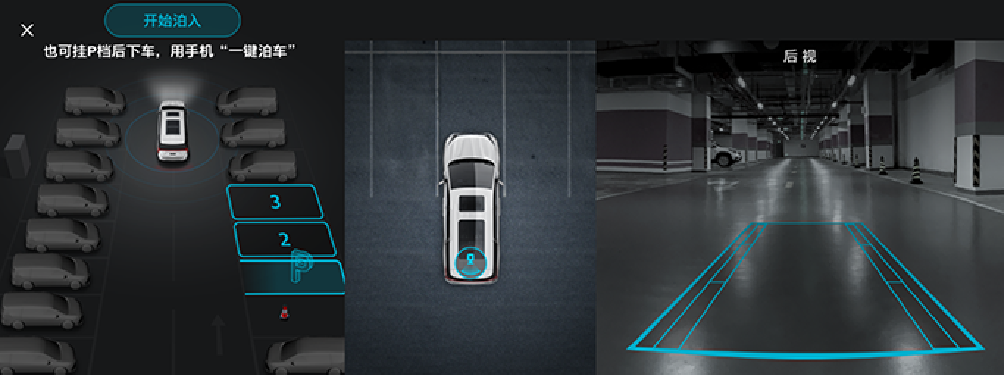
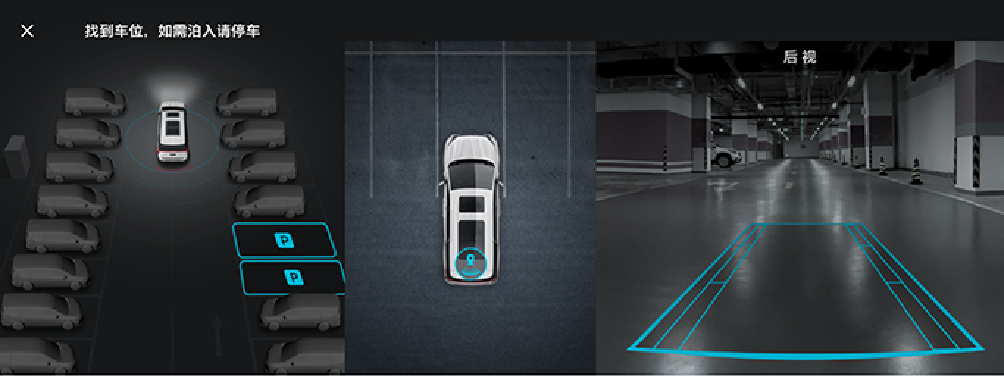
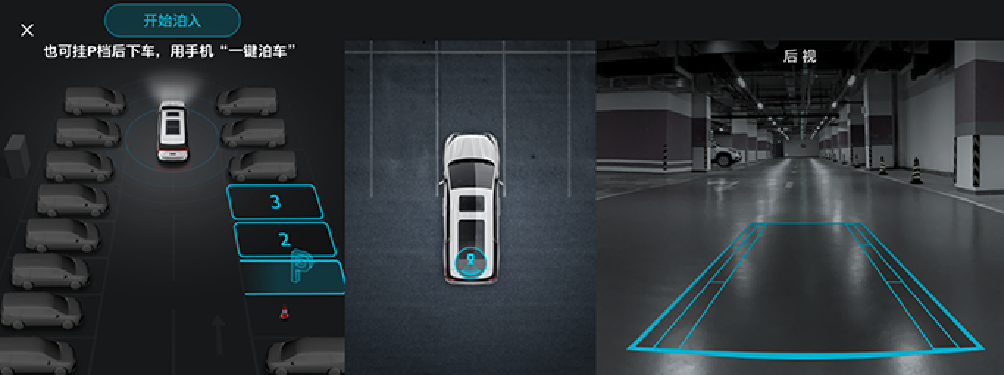
通过中控屏上的360按键进入环视界面,然后点击泊入按键激活泊车功能。当系统搜索到符合要求的车位,且车辆的位置和周围环境符合泊车要求时,在中控屏上会出现可泊车位提示。
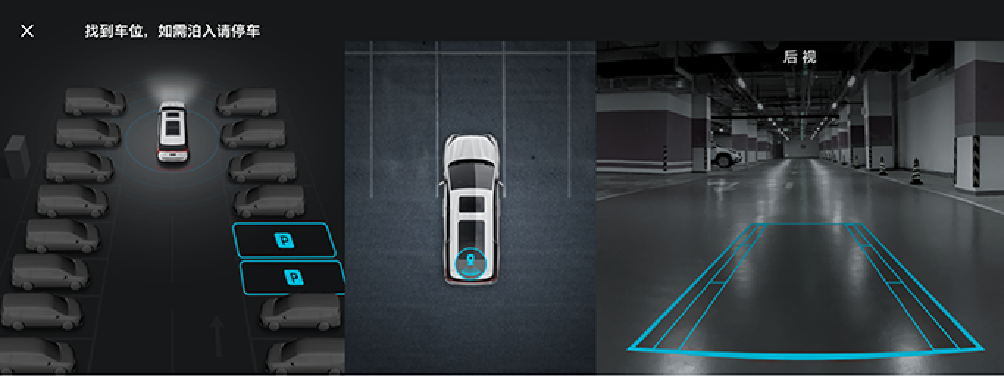
-
刹停车辆,保持制动,点击选择适合及安全的可泊车位(也可以使用系统默认推荐的车位)。
-
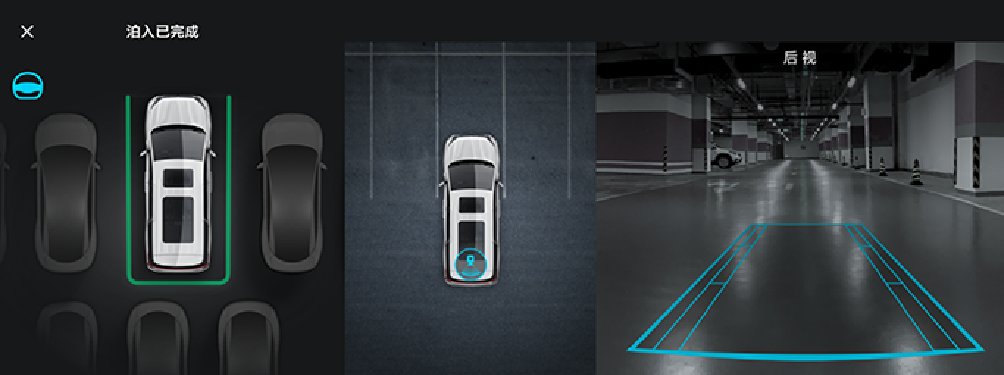
点击开始泊入按键,车辆开始自动泊入车位,驾驶员需持续保持对周围环境的观察,确保泊车过程安全。
-
泊车完成后,中控屏将显示“泊入已完成”提示。
|
提醒 |
自动泊出辅助功能仅支持水平车位泊出。 |
-
通过中控屏上的360按键进入环视界面,然后点击泊出按键,当车辆周边环境满足泊出条件时,可激活自动泊出功能。
-
确认安全状况后,保持踩下制动踏板,通过点选屏幕上的泊出方向按键切换泊车方向,松开制动踏板后车辆将开始执行泊出车位,此时您需继续保持对周围环境的观察,确保自动泊出的过程是安全的。

-
泊出完成后,中控屏将显示“泊出已完成”提示。

-
通过中控屏上的360按键进入环视界面,然后点击泊入按键激活泊车功能。当系统搜索到符合要求的车位,且车辆的位置和周围环境符合泊车要求时,在中控屏上会出现可泊车位提示。
-
刹停车辆,保持制动,点击选择适合及安全的可泊车位(也可以使用系统默认推荐的车位)。
-
您挂完P挡后可以选择下车,并在手机“上汽MAXUS”APP中进行操作(进入APP->爱车->智慧泊车->一键泊入),点击一键泊入后,系统自检通过后,点击泊车按键,系统可以进行自动泊车,泊车成功后车辆会自动下电、锁车。

|
提醒 |
自动泊出辅助功能仅支持水平车位泊出。 |
当车辆周边环境满足泊出条件时,在手机“上汽MAXUS”APP中进行操作(进入APP->爱车->智慧泊车->一键泊出->泊出方向选择),点击一键泊出后,系统自检通过后,点击泊出方向按钮,系统可以进行自动泊车,泊车成功后会自动刹停拉起EPB,等待您上车。
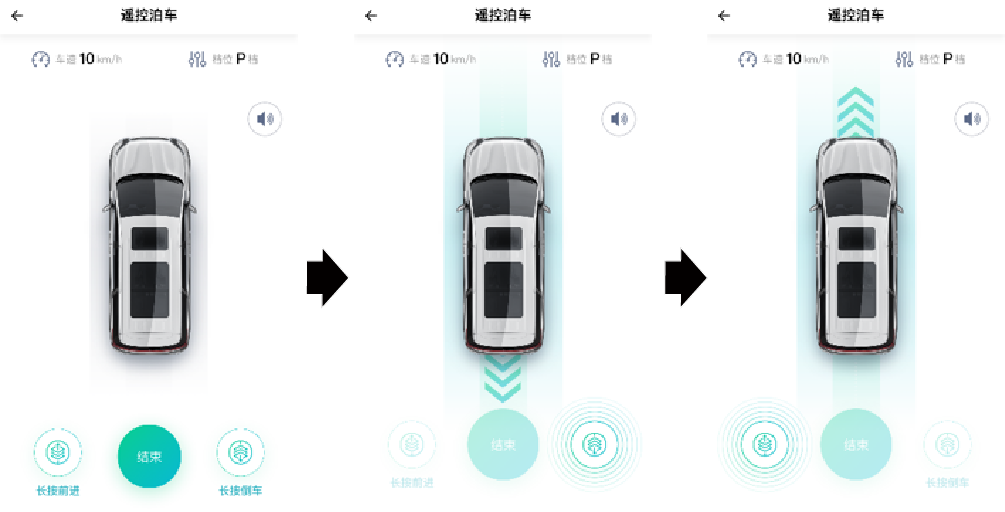
锁车情况下,手机上打开“上汽MAXUS”APP中进行操作(进入APP->爱车->智慧泊车->遥控泊车),系统自检通过后,可在界面上操作按键实现将您的爱车前后移动,方便上下车。
以下情况时,自动泊车系统可能无法按照预期运行:
-
道路为坡道。
-
黑暗(照明条件差)或者能见度差(因大雨、大雪、浓雾等造成)。
-
路缘的材质不是石头,或者无法检测到路缘,如果停车不当,车辆的轮胎和轮圈会被路缘损坏。
-
一个或者多个超声波传感器、环视摄像头污损或者受到妨碍(如污泥或冰雪)。
-
天气条件(大雨、雪、酷热或者极寒温度)干扰传感器工作。
-
雷达受限。
-
摄像头受限。
-
路面凹凸不平,或者车位内有凹坑或凸起物。
-
系统并非总能识别到所有车位,例如:车位标线模糊、破损、混乱或者被覆盖。
-
自动泊车系统可能会错误的识别车位,例如花坛、树木等物体之间的间隙。
-
车位附件有干扰线条,例如未完全清除的旧车先线痕迹、轮胎痕、禁停标线等。
-
传感器无法识别存在高度差的路面,切勿在悬崖边、高台、台阶、临街的人行道等地方使用自动泊车。
-
传感器的识别能力和范围有限,无法识别悬空的物体,也无法识别低矮物体(如低锁、限位杆等)、体积较小、宽度较小的障碍物。当泊车环境中有类似物体时,请务必注意观察,并准备随时接管车辆,以避免碰撞。
-
系统可能无法识别并支持泊入墙角或者拐角处的停车位。
-
车位附近或者车位中有镂空的物体(如自行车车轮、排水口等)。
-
车位附件有圆柱形、方形等形状的柱子。
-
如果安装有雪地防滑链或者备用车轮,请勿使用本系统。
-
狭窄街道上的停车位、或狭窄的停车位并不总是可用。
-
如果装载的物体从车辆突出,请勿使用自动泊车系统。
-
如果左右外后视镜,环视摄像头中任何一个有损坏或处于不正常的位置,请勿使用本系统。
-
狭窄街道上的停车位、或狭窄的停车位并不总是可用,因为可能不具备必要的操纵空间。
-
系统无法判断并排除禁停线或专用车位。
-
请使用经批准的、具有正常胎压的轮胎,避免胎压预警系统处于报警状态,影响自动泊车系统的能力。
-
改装车辆或者在未经本公司授权服务商进行车辆维修,可能会到导致自动泊车辅助受到影响,容易在自动泊车执行过程中发生刮碰/碰撞。
-
许多不可预见的情况都会影响自动泊车系统将车辆泊入的能力。请务必牢记这一点,并记住自动泊车系统可能因此无法正确操控车辆。停放车辆时应注意,并随时准备立即接管车辆操控。
-
当方向盘打死或者存在大角度时,不可使用遥控泊车。
-
自动泊车系统仅是一种驾驶辅助手段,而并非是一贯正确的全自动功能,并不能达到完全的自动驾驶能力,因此,驾驶员必须保持对车辆和环境观察、判断的专注力。
以上示例、警告、限制未尽述影响自动泊车辅助正常工作的所有情况,驾驶员必须在使用自动驾驶辅助及其相关功能时保持专注力,并对安全泊车始终负全部责任。
-
车速过高,系统可能无法正确搜索车位。
-
系统并非总能完全搜索到车位或者完全能泊车成功,若未搜索到车位或者未泊车成功,可以开启系统重新尝试。
-
泊车开始后,注意不能人为施力握住方向盘、踩油门或变换挡位或打开车门,否则会退出泊车系统。
-
可恢复泊车情况:非驾驶员侧车门未关闭,可根据中控屏提示继续泊车。
-
不可恢复中断泊车情况包括但不限于以下情况,须重新进入泊车系统:
-
车速超限
-
关联系统响应超时
-
泊车时间超限
-
泊车系统故障
-
暂停次数超限
-
车辆前后调整次数过多
-
关联系统激活
-
提示用户操作,但用户60秒内无操作
-
-
使用手机泊入时,请寻找合法合适和安全的停放位置,泊车系统并非总能检测到停车位上或者周围物体,务必目视检查,确认安全。
-
使用手机泊出时,请注意观察周围环境,以确保泊出过程中和泊出结束后,车辆周围的安全状态。
-
使用手机操作时,可能存在蓝牙中断,或电话接入切入其他操作界面,系统会暂停泊车。
-
使用手机泊车期间,应时刻注意观察车辆周边环境,如出现异常,请立刻暂停或者停止泊车操作。
-
不可恢复中断泊车情况包括但不限于以下情况,须重新进入泊车系统:
-
车速超限
-
关联系统响应超时
-
泊车时间超限
-
泊车系统故障
-
暂停次数超限
-
车辆前后调整次数过多
-
关联系统激活
-
提示用户操作,但用户60秒内无操作
-