泊车辅助系统
提醒 |
您车辆上的泊车辅助系统的类型取决于您购买的实际车辆配置。 |
倒车雷达传感器
警告 |
泊车辅助系统并不是始终可靠的,它仅仅起向导的作用!倒车雷达传感器可能探测不到某些类型的障碍物,例如:铁丝网或绳索类细小物体、靠近地面的小物体、锥状物体、某些表面不反射的物体。 雷达传感器上应当没有污垢、冰和雪。如果雷达传感器的表面有沉积物,会妨碍它的正常工作。所以在清洗车辆时,应避免用高压水枪近距离直接喷射雷达传感器。 |
位于后保险杠中的四个倒车雷达传感器扫描车辆后部区域,判断是否有障碍物。如探测到障碍物,传感器就会计算它至车辆后部的距离,并以报警声响信号向驾驶员传送这一信息。非常重要的是,该系统仅仅是一个泊车辅助系统,不能把它作为观察和个人判断的替代物。
选择倒挡R后,泊车辅助系统会发出一声0.5秒提示音,提示系统自动开始工作。当选择其它挡位时,泊车辅助系统停止工作。
提醒 |
如果选择倒挡R后,系统发出3秒提示音,表示该系统发生了故障,应尽快联系本公司授权服务商检修。 |
当车辆后部中间两个雷达距离障碍物约150厘米时,或两侧雷达距离障碍物约60厘米时,泊车辅助系统开始发出警报声,距离障碍物越近,警报声越急促。
当车辆距离障碍物距离小于35厘米时,泊车辅助系统将发出长鸣。此时如果继续倒车则障碍物将不能被有效识别。

前、后雷达传感器
警告 |
泊车辅助系统并不是始终可靠的,它仅仅起向导的作用!雷达传感器可能探测不到某些类型的障碍物,例如:铁丝网或绳索类细小物体、靠近地面的小物体、锥状物体、某些表面不反射的物体。 雷达传感器上应当没有污垢、冰和雪。如果雷达传感器的表面有沉积物,会妨碍它的正常工作。所以在清洗车辆时,应避免用高压水枪近距离直接喷射雷达传感器。 |
位于前保险杠中的雷达传感器扫描车辆前部区域,位于后保险杠中的四个雷达传感器扫描车辆后部区域,判断是否有障碍物。如探测到障碍物,传感器就会计算它至车辆的距离,并以报警声响信号向驾驶员传送这一信息。非常重要的是,该系统仅仅是一个泊车辅助系统,不能把它作为观察和个人判断的替代物。
选择倒挡R后,泊车辅助系统会发出一声0.5秒提示音,提示系统自动开始工作。退出倒挡R,后雷达泊车辅助系统停止工作。
选择倒挡R或前进挡D时,车速从0公里/小时升高至15公里/小时之间,前雷达泊车辅助系统工作;车速从15公里/小时降低至12公里/小时之间,前雷达泊车辅助系统待机;车速降低至12公里/小时及以下时,前雷达泊车辅助系统工作。
提醒 |
如果选择倒挡R或前进挡后,系统发出长音鸣叫,表示该系统发生了故障,应尽快联系本公司授权服务商检修。 |
泊车辅助开关 位于副仪表台上的换挡旋钮右侧,按下泊车辅助开关开启前雷达泊车辅助系统,泊车辅助开关上的指示灯点亮。
位于副仪表台上的换挡旋钮右侧,按下泊车辅助开关开启前雷达泊车辅助系统,泊车辅助开关上的指示灯点亮。
泊车辅助开关上的指示灯状态反映前、后雷达泊车辅助系统工作状态,当系统正常工作时,泊车辅助开关上的指示灯会常亮。
当前、后雷达泊车辅助系统工作时,如果前、后雷达泊车辅助系统出现了故障,泊车辅助开关上的指示灯会闪烁6秒,然后熄灭,直到雷达系统故障解除才会再次亮起。
提醒 |
当泊车辅助开关上的指示灯在闪烁过程中,此时系统故障解除,指示灯会立即从闪烁状态切换至常亮状态;当指示灯在闪烁过程中,系统退出工作状态,那么指示灯会立即熄灭。如果系统发生了故障,应尽快联系本公司授权服务商检修。 |
当车辆后部中间两个雷达距离障碍物约150厘米时,或两侧雷达距离障碍物约60厘米时,泊车辅助系统开始发出警报声,距离障碍物越近,警报声越急促。
当车辆前部前雷达距离障碍物约60厘米时,泊车辅助系统开始发出警报声,距离障碍物越近,警报声越急促。
提醒 |
对于配置自动泊车辅助系统的车辆,当车辆前部前雷达距离障碍物约150厘米时,泊车辅助系统就开始发出警报声。 |
当车辆距离障碍物距离小于35厘米时,泊车辅助系统将发出长鸣。此时如果继续倒车则障碍物将不能被有效识别。
提醒 |
前雷达在前进挡D状态下具有3秒静音策略,如果经过了3秒,障碍物距离没有任何变化,则警报声将会停止,如果障碍物距离又发生了改变,则系统恢复发出警报声。 |

倒车摄像
警告 |
倒车摄像泊车辅助系统并不是始终可靠的,它仅仅起向导的作用!摄像头视野范围是有限的,探测不到视野范围以外的障碍物。 |
倒车摄像泊车辅助系统的工作状态:
当选择倒挡R后,娱乐系统显示屏画面切换到倒车摄像的工作状态,显示屏显示车辆后方的景物图像,以供驾驶员倒车时参考。
当选择其它挡位时,倒车摄像泊车辅助系统停止工作,显示屏恢复倒车前的状态。

提醒 |
在车辆进入倒车状态时,摄像头输出静态倒车轨迹,静态倒车轨迹是以地平面为参照物,并显示在娱乐系统显示屏上,采用红、黄、绿三种颜色分段标识。 |
360环视
警告 |
泊车辅助系统并不是始终可靠的,它仅仅起向导的作用!摄像头视野范围是有限的,探测不到视野范围以外的障碍物。 |
360环视系统包括4个摄像头,分别装在车身的前、后、左、右四个方向。
360环视系统的工作状态:
当选择倒挡R后,娱乐系统显示屏自动切换至360环视界面,驾驶员可以通过图像来判断车辆与障碍物的位置。

当车速小于30公里/小时,按下副仪表台上的360环视开关 ,360环视系统将开启,娱乐系统显示屏会依据当前车辆的操作,切换至左转、右转、正常行驶的360环视界面。
,360环视系统将开启,娱乐系统显示屏会依据当前车辆的操作,切换至左转、右转、正常行驶的360环视界面。
提醒 |
可通过触摸娱乐系统显示屏上的前、后、左、右按键,选择想要观看的区域。 |
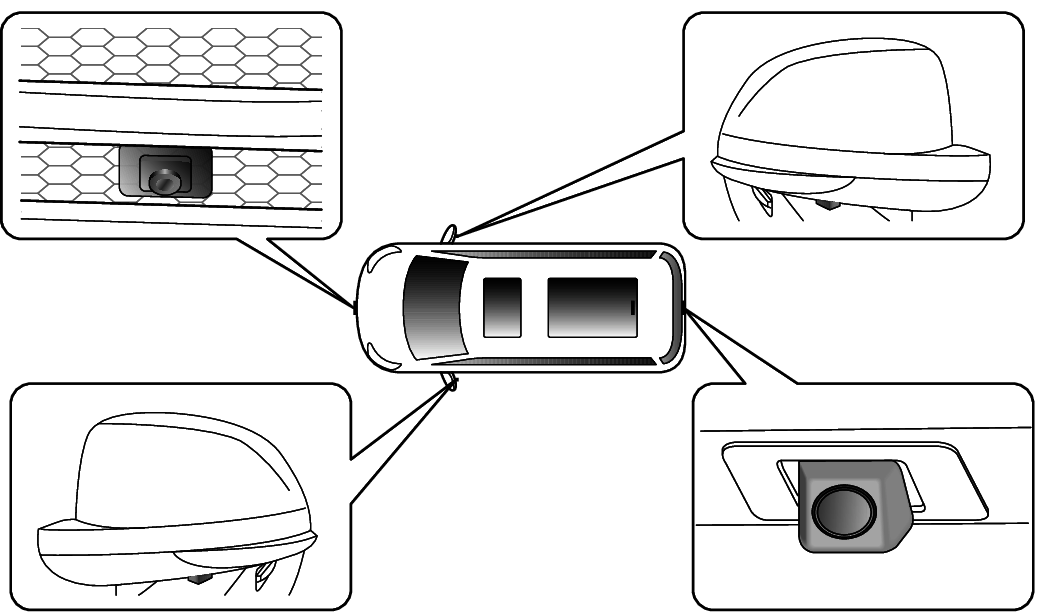
540环视系统(AVM)
警告 |
540环视系统并不是始终可靠的。它仅仅起辅助的作用!由于摄像头视野范围限制,探测不到盲区及视野范围外障碍物,即使系统运行时,也请仔细查看车辆周围环境。 |
540环视系统包含四个摄像头及一个控制器,摄像头分别位于车辆的前、后、左、右四个方位。控制器位于主驾座椅下方,内存卡在控制器侧方。
540环视系统提供了多种辅助功能,主要包括:
2D图像
3D视角
车底视角
环视监控
提醒 |
您车辆上540环视系统的类型取决于您购买的实际车辆配置。 |
选择倒挡R后触发环视系统。
车辆车速<15公里/小时时,通过娱乐系统屏幕主界面上的“360”图标唤醒全景系统。
功能开启后,可以在操作区进行2D/3D及前/后/左/右视角切换。
在全景界面下点击屏幕左上角“╳”进行关闭。
车辆车速≥30公里/小时时系统自动退出。
在全景界面下点击屏幕上的“设置”,用户可以选择开启/关闭“转向触发全景”,“前向轨迹线”“宽视角”等子功能。

车底视角功能可以提供车底的视野情况,比如观察井盖、马路牙及轮胎是否回正等情况。
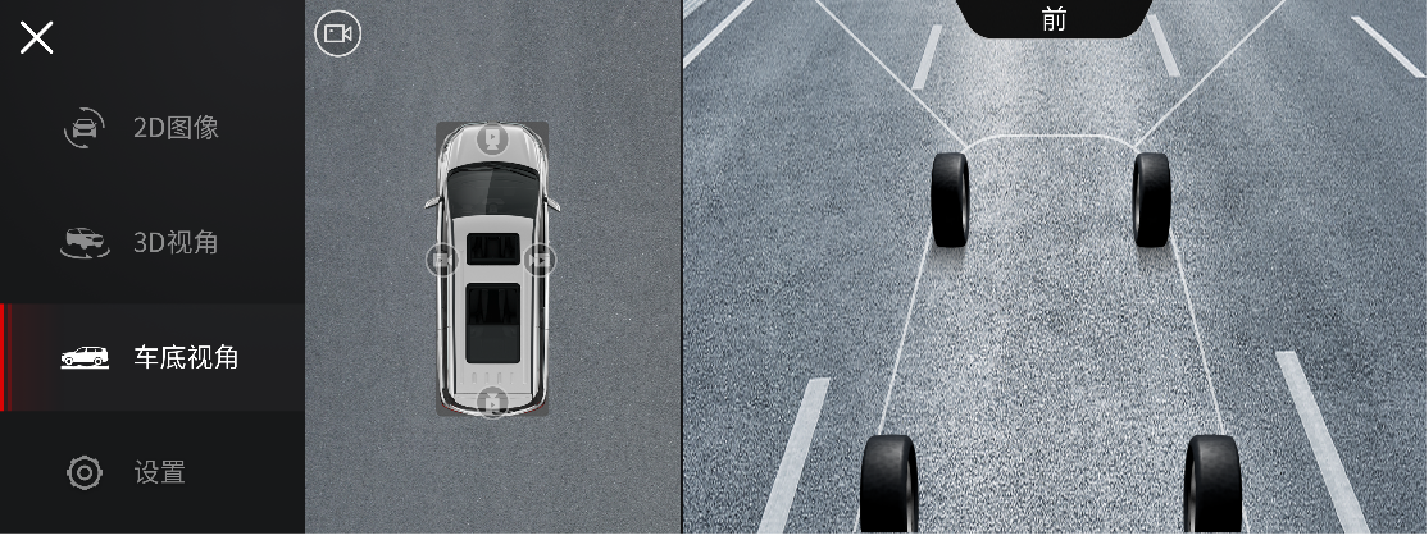
在全景界面下点击屏幕上的“车底视角”进入车底视角界面,默认是前视角。
点击“2D图像”或“3D视角”切换出车底视角。
点击屏幕左上角“╳”关闭。
车辆车速≥30公里/小时时系统自动退出。
环视监控功能实时记录车辆周围的环境,方便用户查阅近期车辆周边的行车记录。

在全景界面下点击 图标。
图标。
在环视监控界面下点击左上角返回按键。
将车辆停放在安全的位置,关闭车辆点火开关,确保安装TF卡时不会遇到危险。打开驾驶员车门,观察驾驶员座椅底部,中间部位处为360环视控制器,TF卡便安装在该控制器上。
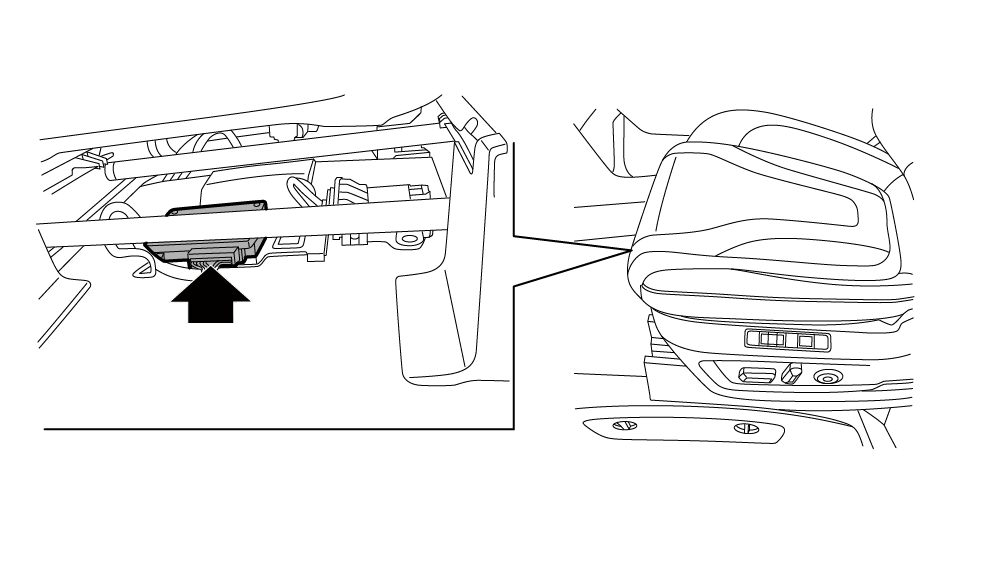
按下图中箭头指向触摸控制器的侧面,触摸到方形卡槽。

方形卡槽如下图所示,将TF卡金属贴片面朝上,安装在TF卡槽中。

打开车辆点火开关,打开360环视监控,观察环视监控视频是否存在,且是否正在录制,若存在环视监控视频,则表示安装完成。
提醒 |
需自行购买TF卡,插入驾驶员座椅下方的环视控制器的卡槽中,环视监控功能才能使用。容量16GB/等级Class10及以上/读写速度30MB/S以上。视频文件夹存满后,系统会自动进行循环擦除,删除最早的视频;在视频录制过程中拔卡或者车辆异常断电,当前录制的视频将损坏无法播放,且TF卡也易受损坏。受播放器限制,仅可回放前后左右组合视图,不能进行单视图回放。若无TF卡或TF卡故障,无法使用环视监控功能。请勿使用山寨卡、仿冒卡等,避免因TF卡质量问题引起视频无法正常写入或读取。 |
自动泊车辅助系统
警告 |
本系统为泊车辅助系统,并非所有情况下都适用,且不可完全代替驾驶员驾驶与判断,即使系统处于运行状态,驾驶员也须谨慎驾驶判断,避免发生碰撞风险(必要时可干预方向盘及刹车)。在某些情况下,某些障碍物的反射面或外部噪音都有可能使系统无法准确识别到障碍物。某些特殊情况下,系统受到相近频率的声波干扰,也会产生误报警现象,从而泊车失败。 |
按下副仪表台上的自动泊车开关
 选择泊车模式,默认为水平右侧找车位模式,再次按下切换为垂直找车位模式,选好模式后进入找车位界面。
选择泊车模式,默认为水平右侧找车位模式,再次按下切换为垂直找车位模式,选好模式后进入找车位界面。


寻找水平右侧车位 寻找水平左侧车位 

寻找垂直右侧车位 寻找垂直左侧车位 通过打转向灯进行选择左边找车位还是右边找车位,按组合仪表信息中心显示向前搜寻,泊车辅助系统寻找车位并检查车位是否足够宽敞,当找到适当车位后会显示找到车位界面,组合仪表信息中心界面显示移车方向。


找到水平右侧车位 找到水平左侧车位 

找到垂直右侧车位 找到垂直左侧车位 根据组合仪表信息中心提示切换挡位、控制制动。以泊入水平右侧车位为例。


对于配置自动泊车辅助系统的车辆,请根据组合仪表信息中心提示切换挡位。


根据组合仪表信息中心提示继续进行操作。


车辆进行泊车,成功后组合仪表信息中心提示“泊车成功,请接管车辆”。

按下副仪表台上的自动泊车开关
切换为泊出功能,通过打转向灯切换泊出方向。


左侧泊出 右侧泊出 泊出方向选定后系统计算识别到有足够的移车空间,则方向盘被电子转向系统接管。以左侧泊出为例。


对于配置自动泊车辅助系统的车辆,请根据组合仪表信息中心提示切换挡位。


根据组合仪表信息中心提示继续进行操作。


车辆泊出成功后,组合仪表信息中心提示“泊车成功,请接管车辆”。

注意 |
系统在泊车过程中仍保持雷达探测警示音及障碍物方位显示,实时告知驾驶者障碍物信息确保泊车安全。 |
按动
按键退出泊车。人为握住方向盘。
驾驶员安全带松开。
在泊车提示操作界面超过30秒。
行车搜索车位时,车速高于30公里/小时并保持于30秒以上。
自动转向过程中,车辆车速达7公里/小时以上。
EPS转向系统失效。
泊车时间超过4分钟。
泊车过程步数(挡位切换)大于11步。
泊出时前方无障碍车。
超声波雷达传感器失效。
驾驶员车门未关。
泊入车位前,请确认停车位内没有障碍物,例如石子、细柱子、牵引杆或自行车等,因为系统可能探测不到这类障碍物。
当使用自动泊车辅助系统将车辆停放在紧靠路边沿的停车位时,系统设定的运行轨迹可能会超出路边沿,导致凸起的路肩损坏车辆的轮胎或轮辋,因此注意周围环境,控制车速,必要时进行人工干预。
组合仪表上显示的泊车进度条按照路径规划中的计算距离显示,可能出现与实际泊车行驶状态不完全一致,泊车过程中驾驶员需注意周边环境,准备随时接管车辆。
避免用高压清洗机或蒸汽清洗机对传感器进行清洁,以免损坏传感器。清洗车辆时应使用较小的水流短时间冲洗传感器表面,且至少保持10厘米以上的距离。
系统可能无法识别某些障碍物(如铁丝网篱笆、草丛、蓬松的雪等),因此在停车入位前请再次检查所显示的停车位是否有足够的空间。
为了防止碰撞,优先保证车辆安全,雷达探测到过近障碍物,可能会出现规划不出泊车路径,车辆原地静止的情况,该情况持续一定时间后会退出,驾驶员需自行接管。
系统可能将入口、门道、交叉路口、以及两棵树或两个路墩之间的空间当做有效的停车位,因此需要驾驶员注意系统检测到停车位的可用性。
如果泊车辅助报警系统探测到一个障碍物,车辆接近障碍物时,可能出现障碍物在探测范围内消失,从而探测不到这些物品。请注意周边环境,不要忽视泊车辅助系统发出的警报,必要时进行人工干预。
如果需要更换轮胎,请确保更换轮胎与原车轮胎尺寸规格完全一致,并且对四轮定位进行校验。
如果保险杠或雷达传感器没有正确安装,可能导致系统无法正常工作。
当进入地下停车场,由于周边环境复杂,不建议采用本系统进行泊车。
当泊车场所空旷时,车辆可能出现距离较长的找车位或泊车路径调整过程,泊车效果可能达不到预期。
当车位位于角落或弯道处,系统可能无法正常泊车。
由于雷达布置在车辆下部,无法探测到过高的障碍物(如方柱、相邻车辆的后视镜等),请注意周边环境,必要时进行人工干预,否则可能造成车辆严重损坏。
当系统准备将车辆停放在带有限位杆、限位块的停车位时,系统设定的运动轨迹可能导致车辆轮胎压上限位块,因此请注意周边环境,注意车速,必要时进行人工干预。